Overview
图并不能简单理解为一个和 stack, queue, list, tree 并列的数据结构。
图是一种表达能力非常强的数学语言,它能描述一个非欧空间,跟它对标的应该是代数或者几何。
但是也应该注意到,图论并不是一种算法方法论,在图论算法中,你可以看到有贪心、动态规划、线性规划和近似算法等方法。
DFS
不止一次递归
DFS 并不是只执行一次递归就可以了,因为一个图并不一定是一个联通分量,所以可能一次递归结束以后,还需要在进行多次递归,直至所有的点都被遍历到。
但是无论多少次遍历,DFS 都需要遍历每个节点和与之相连的每条边,所以时间复杂度最小是 (使用邻接表实现),用邻接矩阵实现则会变成 。同样的 BFS 也是。
Previsit & Postvisit
概念本身非常好懂,都是 vertex 的属性,一个是第一次遍历此 vertex 的时间,一个是遍历玩 vertex 所有后继的时间。
关键是它的应用,基本上有两个:
- 作为判断 edge 类型的依据,对于一个边 ,我们可以根据 range
pre[u] ~ post[u]与 rangepre[v] ~ post[v]来判断 edge 是不是后向边。进一步,而向边有可以用于判断图中 是否有环路 。更进一步,如果一个有向图中无环,那么他就是 DAG 图 - 在无环的情况下,根据
post数组对节点进行逆序排序,我们就可以得到一个 拓扑序 ,而拓扑序是一种描述图结构的强大表达方式。更进一步,这也可以作为判断 SCC 算法的 sink vertex 的依据。直观来说,某个节点的post值越大,它就越可能是一个 source 。
Edge Type
对于有向图来说,一共有四种边:
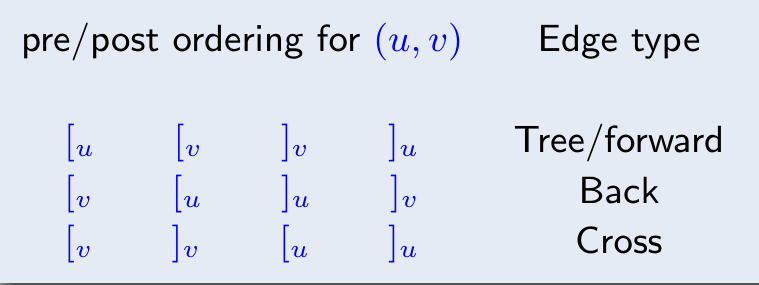
需要强调的是,Edge Type 的关键是确实有一个 edge ,我们不能随便拿两个之间都没有边连接的节点 来判断他们是不是有一个后向边。
所有边的类型中,我们最关注后向边,因为有定理:
一个有向图中有环,当且仅当图中有后向边。
还有一个有趣的事情,就是边的类型是与特定 DFS 绑定的,可能某个边在某次 DFS 中是一个后向边,而再另一次 DFS 中,就变成树边了。但是“有没有环”却是一个静态性质。
图的分解
我们可以使用迭代 DFS 的方式来确定图中的强连通分量(Strongly Connected Components)。
我们可以将图理解成一个有两个层次的结构:底层是一个个的 SCC ,而上层是由这些 SCC 为节点构成的 DAG 。
正因为上层是一个 DAG ,所以有两类特殊的 SCC ,source SCC 和 sink SCC ,它们有如下非常显然的性质:
- 我们对一张图执行 DFS ,得到的
post最大的节点,一定在 source SCC 中。 - 我们对 sink SCC 中任意节点执行一次 DFS 递归(仅一次),那么遍历到的所有节点的集合就是 sink SCC 本身。
根据这两个性质,我们就可以构造出 SCC 算法。
- 首先我们将图反转过来,然后执行 DFS 获得 source SCC (这就是原图的 sink SCC)中的一个点
- 然后对着这个点执行 DFS ,就获得一个 sink SCC
- 将 sink SCC 删掉,然后再执行整个流程(本质是在反转图的高层按拓扑排序执行)
MST
Overview
MST(Minimum Spanning Tree) 的本质是一个边集。Kruskal 和 Prim 都是无向图上的算法。
Cut & CutSet
之所以要先介绍割(Cut)和割集(CutSet)的概念,是因为这些概念会影响后面 MST 算法的证明。
Cut 指的是将图 上的节点集合 分割成 和 两个部分,而 Cut Set 指的是一组边的集合 ,有 中的每条边,它们的一个端点在 中,而另一个端点在 中。直观上说,就是 是连接 和 的桥梁。
分割与 MST 的关系是,如果边集 是某个最小生成树 的一部分,那么某个分割 ,如果满足 中没有横跨 和 的边,那么这个分割对应的 CutSet 中权值最小的边 ,满足 也属于某个最小生成树(不一定是 )。
分割的这个性质,让我们找到了一种 贪心的、可迭代 的“让 MST 持续生长”的方式。
Kruskal
Kruskal 算法从全局视角来构建 MST。它从最小权重的边开始,将边添加到生成树中,以确保不会形成环,直到树含有所有顶点。
通常使用并查集(Disjoint Set Union,DSU)来管理森林,快速判断和合并树。时间复杂度为 。
Prim
Prim 算法从局部视角构建 MST。它从任意一个起始顶点开始,逐步将连接的未访问顶点添加到生成树中。类似于 Dijkstra 算法。
通常使用优先队列(如堆)来选择当前最小权重的边。时间复杂度为 。
因为 Kruskal 需要对边进行排序,所以相比于 Prim 对于稀疏图(边少)效果更好,而在稠密图上表现较差。
最短路径
Overview
最短路径不止有 Dijkstra 一种算法,根据图的不同有不同的算法。
边均为 1 的图
这种图可以直接用 BFS 即可。
只正边图
使用 Dijkstra 算法。Dijkstra 算法其实可以规约到 BFS 上,将长度大于 1 的边(比如说 3),那么就引入多个中间节点(2 个),这就就会变成 BFS 算法。而且你会发现这种 BFS 稍加化简就会变成 Dijkstra 。
此外 Dijkstra 还有一个解释,就是我们的本质是在维护一个“已经确定最短路径的点的集合”,我们称之为 。最开始的时候这个集合中只有起始点,每次我们挑选出“最短路径”的时候,本质是将这个最短路径的“终点”加入 的过程,换句话说,这个点的最短路径已经被确定了,以后无论怎么变化,都不会影响原点到这个点的最大路径大小了。
这么一说似乎有些反直觉,因为我们会觉得有这种情况“虽然现在看着我们直接离这个点挺远的,但是我们只要用一个很小的代价先到某个中间节点去,然后那个中间节点又恰好离这个点很近,那么不就不能现在就确定吗?”。举个例子:
第一次迭代, 是那个“确定”的点,此时 还离我们很远:
| A | B | C |
|---|---|---|
| 2 | 100 | 3 |
第二次迭代, 被确定,此时更新 ,发现 经过 的中转,变得进了:
| A | B | C |
|---|---|---|
| 2 | 4 | 3 |
看上去 似乎符合了我们的认知,就是它被一个中间节点 给更新了,缩小了整整 25 倍。那么我们考虑, 能不能更新 ,让从原点到 的路径也变得更小呢?不幸的是,并不可能,因为在只有正向边的图上,经过 到 一定比直接到 的路径要长,而在第一轮迭代中,我们就知道了现在到 的路径已经比到 的短了。
Dijkstra 的算法就是迭代 次,每次挑选出最小的值对应的点,并且根据这个点更新其他路径。如果用优先队列实现,那么我们在初始化的时候,需要将所有的节点都插入优先队列,那么就是 次,而后面更新路径,如果每条边都会更新路径,那么我们需要插入优先队列 次。优先队列的每个操作的复杂度都是 ,所以最终的时间复杂度是
含负边图
处理含有负边的图的时候,Dijkstra 算法就不再适用,我们需要用 Bellman-Ford 算法。图上可以有环,但是不能有负权重环。
所以为什么 Dijkstra 会不适用?回看我们对于 Dijkstra 的解释,就会发现它更新边,依赖于“边是正的”这个特点(不然在上面的例子中,真的有可能从 到 比直接到 要近)。
那么我们该怎么办,其实都还好,那么就是我们原来是根据当前点更新那些没有被确定的点的路径,现在我们更新所有点的最短路径,这样就没有问题了。
此时的算法复杂度为 。
负权重环可以被很容易探测出来(具体算法我记不清了)。
DAG
我们可以对着 DAG 生成一个拓扑序,然后按照拓扑序遍历节点,并对当前访问的顶点出发的边执行更新操作。
这个算法并不要求边是正数。
我们也可以让边的值取负值,这样我们就可以求最长路径了。
所有顶点间的最短路径
我们解决这个问题使用基于 Dynamic Programming 的 Floyd-Warshall 算法。
其中状态设计为 为仅仅允许使用 作为中间节点的时候, 到 的最短路径长度。
状态转移方程为:
最大流最小割问题
Overview
最大流最小割问题可以被处理成一个 Linear Programming 问题。最大流问题是一个求解最大值的问题,而最小割问题是最大流的对偶问题。
我们研究这个问题的时候,不能用简单的“加权边”进行建模了,实际上每个边 有两个属性,分别是“流量 ”和“容量 ”。
最小割指的是容量 CutSet 的最小值。而不是流量 CutSet 的最小值。
当最大流问题取到最值的时候,恰好最小割也取到最值,有“最大流等于最小割”。而在没有取到最值的情况,则是“最大流一定小于最小割”。这就是最大流最小割问题。如果从直观上理解,那么就是一个图上最大的流量,是被最小的容量割所限制的。
Ford-Fulkerson
这是一种求解最大流问题的算法。它的思想非常简单,就是“尽可能”地找到可以增加流量的方法,然后增加流。
为了描述算法,我们先引入增广路径(Augmenting Path)的概念。它指的是在某个流图上一个从源点到汇点的路径,而且自身还有一定的流量(要不超过容量限制)。显然增广路径就是我们逐渐增大流量的抓手,我们最后的流量图,就可以视为一条条增广路径的叠加。设计的算法,就是一次次搜索出增广路径,然后更新容量(相当于将流从图上删去),直至再也找不到一个增广路径的时候就停止。
但是不幸的是,我们并不能在原图上直接进行这个算法,因为这可能会导致增广路径因为“先来后到”而达不到最优值,所以我们要允许“流量的撤销”。
因此我们实际进行算法的图被称作残差图(Residual Graph),这个图在一开始是仅有容量性质的原图,我们每在原图的某条边 上增加一些流量,都需要更新残差图:
- 减少 的值:相当于使用掉了一部分容量
- 增加 的值:创举,相当于允许之后这部分流量再次撤销。
那么这种算法的时间复杂度是多少呢?这个算法可以分为两个部分:
- 搜索出一条增广路径
- 重复迭代搜索,直至找不出任何一条增广路径。
搜索增广路径可以使用 DFS 和 BFS ,那么时间复杂度都是 ,我不知道为啥,似乎在这个算法分析中,常常会被记作 ,虽然有道理,但是我并不觉得这里有什么特殊的。
那么我们会迭代多少次呢?如果我们使用 DFS ,那么我们最差会迭代 次,其中 是所有边中最大的容量,也就是一点点(1 step)增加这个最大容量,那么整体的时间复杂度就是 。这样就退化成了一个伪多项式时间算法了,显然是我们不能接受的。
幸运的是,如果我们使用 BFS ,那么迭代次数不会超过 ,所以总的时间复杂度是 。
为什么 BFS 的迭代次数不会超过 呢?这是因为我们观察到 BFS 会选出当前残差图上的最浅路径。此外需要强调一下,这里的“最浅”指的是“深度最小”而不是“路径长度最小”,如果真的是最短路径长度,那么应该用 Dijkstra 算法了。而在不同次迭代中,人们发现每次的最浅的深度都在增加,而从源点到汇点的深度是有限的,所以最终效果就是只需要迭代有限次数。
最大流最小割
我们现在已经知道了“最大流等于最小割”的事实,我们继续讨论一下当我们取到最大流的时候,最小割是啥?
其实非常直观,当我们取到最大流的时候,就说明源点和汇点之间不再存在增广路径(实际上就是不存在路径了),那么我们从源点进行一次搜索,所有被搜索到的节点构成的集合 ,与剩余的节点 之间的割,就是最小割,这也非常自然。
Partition & Matching
Matching
Matching 是一个边集,这个图上的所有顶点,都只会与这个边集里面的每个边最多有一次关系。直观来说,就是不能有一个顶点,有 Matching 的多条边连在他上面。只能有一条边、或者完全没有边连在上面。
叫作 Matching (匹配),也就是所有被这个边集联系起来的顶点,都是一对一的。
所谓的完美匹配(perfect matching),指的是这个边集所涉及的所有顶点,刚好就是图上的所有顶点。也就是说,这个图上的所有顶点都可以一一对应。
Bipartition
二部图(Bipartition)是一种特殊的图,它的顶点分为 和 两个部分,所有的边,有一端在 ,另一端在 。
二部图和匹配关系和密切,但是也是完全对应的。在非二分图上也可以有匹配的概念(可以考虑成原本的二分图中, 内节点之间可以有边)。我们之所以研究二分图上的匹配,是因为它可以被规约成一个最大流问题。
为了将其规约成最大流问题,我们可以添加一个虚拟源点,用容量为 1 的边连接 中所有的点,再添加一个汇点,用容量为 1 的边连接 中所有的点。这样就可以使用最大流算法来求匹配了。
这样求出来的匹配,是一个最大的匹配(也就是匹配中的边的数目最多),但是不一定是完美匹配。
Hall’s Marriage Theorem
Hall’s Marriage Theorem(霍尔婚嫁定理):所有男生都能成功配对的充要条件是:任意选出 个男生,他们合起来认识的总女生数必须 。
形式化的表述是:任意 ,有 。其中 是 的邻居。则满足完美匹配。
对偶性 – König 定理
既然二部图上的最大匹配问题可以被规约到最大流问题,那么这个问题是不是也像最大流问题一样,有一个直观的对偶问题呢?
还真有,这就是最小点覆盖问题,也就是最少用多少个点,就可以覆盖二部图上的所有边?根据 König 定理,有:在二部图上,最大匹配等于最小点覆盖。