概念
线性规划(Linear Programming)由以下元素组成:
- 1 个目标函数(Objective Function)
- n 个决策变量(Variable),均为实数
- m 个不等式约束(Constraint)组成
有多个变量,就说明规划空间有多少个维度,而有多少个约束,就有多少个超平面。
每个线性规划都可以转换成标准型(Strandard Form),对于标准型的 PL 的求解,我们一般会采用单纯形法(Simplex)来求解,而单纯型法,需要将标准型转换成不同的松弛型(Slack Form)。
松弛型(Slack Form)的本质是通过引入松弛变量(Slack Variable)将原本的不等式约束转换成等式约束。并通过不断换入换出松弛变量,来达到优化目的。
标准型的 PL 都存在对偶(Duality)问题,这种对偶问题本质是拉格朗日(Lagrangian)乘子法在“线性规划”下的一个特例。
标准型
线性规划的标准型如下所示:
为了将普通 PL 转换成 Standard PL ,需要进行转化:
非标准型可能存在的三种情况:
- 目标函数为 类型
- 存在 约束条件(非标准形式)
- 某些变量 缺少 的非负约束
前两种情况的处理方法:
- 目标函数转成
- 转成
- 转成
对无约束变量 :
- 令 (替换所有原 )
- 新增两个约束:
Duality
形式
标准型如下:
则他的对偶问题为:
对偶定理告诉我们,始终有:
而二者取等的时刻,就是两者去到最值的时刻。
原理
那么构造对偶问题的原理是什么呢?源于我们对于原问题目标函数的 拼凑 。我们举个例子,有原问题:
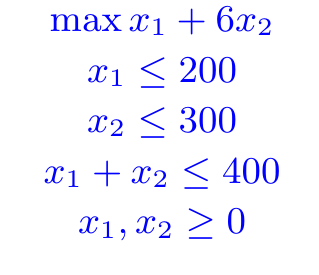
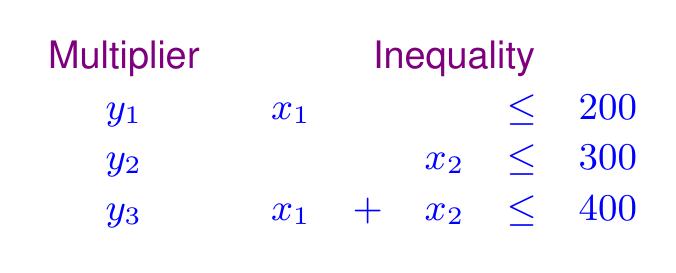
我们考虑给约束增加一些“乘子(Multiplier)”,并把他们加在一起,想办法制造出一个新的非常全面的约束。那么为什么要制造出这个约束呢?因为我们希望直接通过约束“看出来”目标函数的约束在哪里(我们正在求目标函数的最值)。我们的乘加操作如下:
最终我们凑出来的约束为:
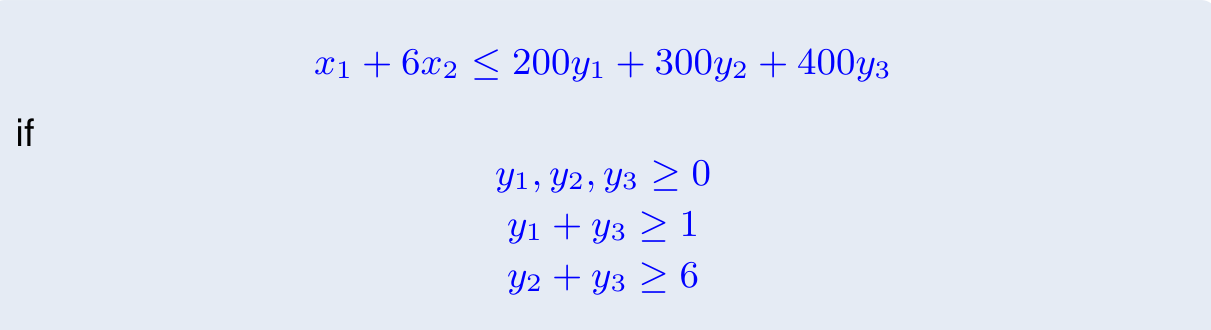
可以看到目标函数小于一个含有乘子的值(也就是 ),那么这个值达到最小的时候,刚好就是原问题目标函数的上限。这是因为原问题目标函数永远比 小,所以当 到达最小的时候,就是原问题目标函数的最大值了。
影子价格
影子价格是对偶问题的一个经济学应用。在我们熟悉的生产问题上,原料是有成本的,而产品是有利润的。我们用原料制作产品,在成本约束下,希望取得最大利润。
而影子价格是原料的利润,它表示,每购入 1 个单位的原料,最多能够赚取的利润。它的本质就是生产问题的对偶问题中变量的最优解。
Slackness
松紧
松弛(Slack)和紧(Tight)的概念是用于形容不等式约束的。当恰好取到相等时,我们称之为这个约束“紧”了,而如果没有取等,那么就是“松”的。
在线性规划问题中,我们很难满足让所有约束同时都是紧的。从数学角度分析,这意味着 有解。有定理:如果增广矩阵 的秩大于矩阵 的列空间的秩,那么方程是无解的。可以看出,应该经常无解。而从几何直观来看,所有约束都是紧的,意味着所有约束形成的超平面都交于一点,这显然很奇怪很不常见。
所以在线性规划问题中,我们常常只有一些约束是紧的,而另一些约束是松弛的。感慨一下,可能人生也是这样的,没有人可以达到自己所有的目标,有些目标本身就是矛盾的。
正因为在 LP 中,只有一些约束是紧的,所以我们需要考虑,牺牲哪些约束,让它们保持松弛,来满足哪些约束,让它们保持紧,以此来最大化目标函数。
但是我们发现,我们该如何用数学语言描述“松紧”呢?我们巧妙得引入了“松弛变量”,我们通过添加松弛变量让原本的不等式约束变成了等式约束。这有什么用呢?注意到,当原约束是紧的时候,对应的松弛变量为 0 ;而当原约束是松的时候,对应的松弛变量不为 0 。
因此,问题被我们转变成了“选哪些松弛变量为 0”的问题。
单纯形法
还有一点,就是当我们引入松弛变量后,我们应该有 m 个约束,n 个决策变量,m - n 个松弛变量,我们的问题是选哪些松弛变量为 0 ,但是实际上,我们的问题会变成,在 m 个变量(包括决策变量和松弛变量)中选择出 m - n 个为零。我暂时没有搞清楚为什么会产生这种结果,这可能和目标函数的线性有关,因为目标函数中的变量前都有系数,只要系数不同,我们就可以尽可能让一个系数更大的变量变大,让系数小的变量为 0,而不是做一个好好先生,两者平分。
基于这点,单纯形法(Simplex)提出了“基变量”和“非基变量”的概念,基变量是那些在达到最值时取值不为零的变量,而非基变量是那些在达到最值时取值为零的变量。那么我们该如何选择呢?我们可以根据 把目标函数仅用非基变量表示,然后就可以可以根据这些非基变量前的系数,判断目标函数还有没有增大的可能。我怀疑这里的“基”并不是线性代数的“基”的概念。
算法的每次迭代都会选择一个“入基变量”和一个“出基变量”,对应这我们选择紧一个约束,松另一个约束。而在几何上,是我们选择从一个顶点到另一个顶点。
单纯形可以成功,依赖的是“决策空间是凸多边形”这个性质。当一个决策空间的某个顶点的所有邻居的值都不如它大时,就说明整个决策空间的所有顶点的值都不如它大。如果决策空间是“凹的”,那么就没有这个性质了。
互补松弛性
互补松弛性(Complementary Slackness)说的是可以从原问题的变量是否为 0,推测对偶问题的约束的松紧情况;也可以从原问题的约束的松弛情况,推测出对偶问题的变量是否为 0 。
- 原问题约束紧 ⇐> 对应对偶变量可能为正
- 原问题约束松 ⇐> 对应对偶变量必须为 0
- 原问题变量为正 ⇐> 对应对偶约束必须紧
- 原问题变量为 0 ⇐> 对应对偶约束不一定紧
互补松弛性的一个重要应用反应在对于影子价格的分析上,当原料影子价格大于 0 的时候,说明原问题的约束是紧的,也就是这个原料是稀缺的,被约束的。而当影子价格等于 0 时,说明这个资源是富余的。
时间复杂度
单纯形法的每次迭代的时间复杂度是 ,而需要迭代的次数是 。具体的证明我不会。单纯形法虽然理论分析上是指数级的复杂度,但是在实际表现中很好。
但是这并不意味着 LP 不是一个 P 问题,苏联数学家 Khachiyan 提出椭球算法(Ellipsoid Algorithm),首次证明 LP 存在多项式时间复杂度的解法。只是这种算法在实际表现中很差,所以我们在现实中还是选择了单纯形法。