基物实验 - 基本实验常识
按照说明文件,考试范围是前三章和开设的所有实验,往年的选做题目中涉及了很多没有在这个学期开设的实验。
这个部分主要是讲解基物实验期末考试中选做题实验的基本常识,主要包括:
- 测量物体的转动惯量
- 示波器及其应用
- 开尔文电桥法测电阻
- 电位差计及其应用
- 分光仪的调整及其应用
- 光杠杆法测量弹性模量
一、测量刚体的转动惯量
1.1 实验原理
测量转动惯量最本质的办法是直接积分。但是因为很多物体很不规则,所以直接积分存在障碍,所以我们采用了一种新的方法,叫做转换测量法,也就是说,不直接算,而是通过测量其他的一些物理量,来把我们想要的物理量求解出来的方法(利用各物理量之间的变换关系来测量某一物理量)。
我们是利用扭摆法来测量刚体的转动惯量的。核心公式是这个
扭摆就类似于一个弹簧,只不过是提供的是力矩而不是力。我们通过测定扭摆的周期(上面是一个微分方程,解出来是一个三角函数的形式),进而测定转动惯量,即
所以如果我们知道 并且可以测出 。事情就解决了,但是事实上,我们不知道 。所以我们得求 。其实我们也不想求,所以我们采用的是比值测量法,我觉得其核心的是把某一个中间变量(在这里是 )用比值的数学方法消掉,这样就可以提高计算的精度。比如说我们首先会测量一个金属载物台(没办法,很多其他待测物体都得放在上面),记录他的周期为 ,然后测量一个 塑料圆柱体(作为标准物体) 的周期 。然后我们考虑一个放在载物台上的待测物体,若其周期为 ,其转动惯量可以表示为
可以看到,这样就避免了 的测量。
在这一节里,我们还验证了中心轴定理,我们采用的是滑块,其理论公式如下
这个公式是滑块如果为放在中轴线上的时候的转动惯量,其中 分别是滑块的内外径,很好理解。
1.2 实验操作
- 安装时要旋紧止动螺丝,否则摆动数次后摆角可能会明显减少甚至会停下。
- 光电探头(用来测周期)宜放置在挡光杆的平衡位置,挡光杆不能与它接触,否则会增大摩擦力矩。
- 弹簧的扭转常数不是固定常数,它与摆动角度略有关系,摆角在 度的时候基本保持不变,在小角度的时候会变小。
- 在称量圆球和金属细长杆的质量的时候,要取下支架,因为质量对其会有影响,但是在测量转动惯量的时候,是不需要考虑的,因为影响较小。(也就是说,在算转动惯量理论值的时候,需要去掉,测量实际值的时候,不需要去掉)。
二、示波器及其应用
2.1 数学原理
示波器除了能直接直观的显示波形之外,其测量内容可以归结为两类 —— 电压和时间的测量,而电压和时间的测量最终又归结为屏上波形长度的测量。
从上面这段话可以看出,要想获得电压和时间,最重要的掌握长度(更直接的是格数)和这两个量的换算关系。而这两个比例系数(被称为灵敏度),一个由 (即灵敏度调节按钮)和其微调旋钮调节,另一个由 和其微调旋钮调节。
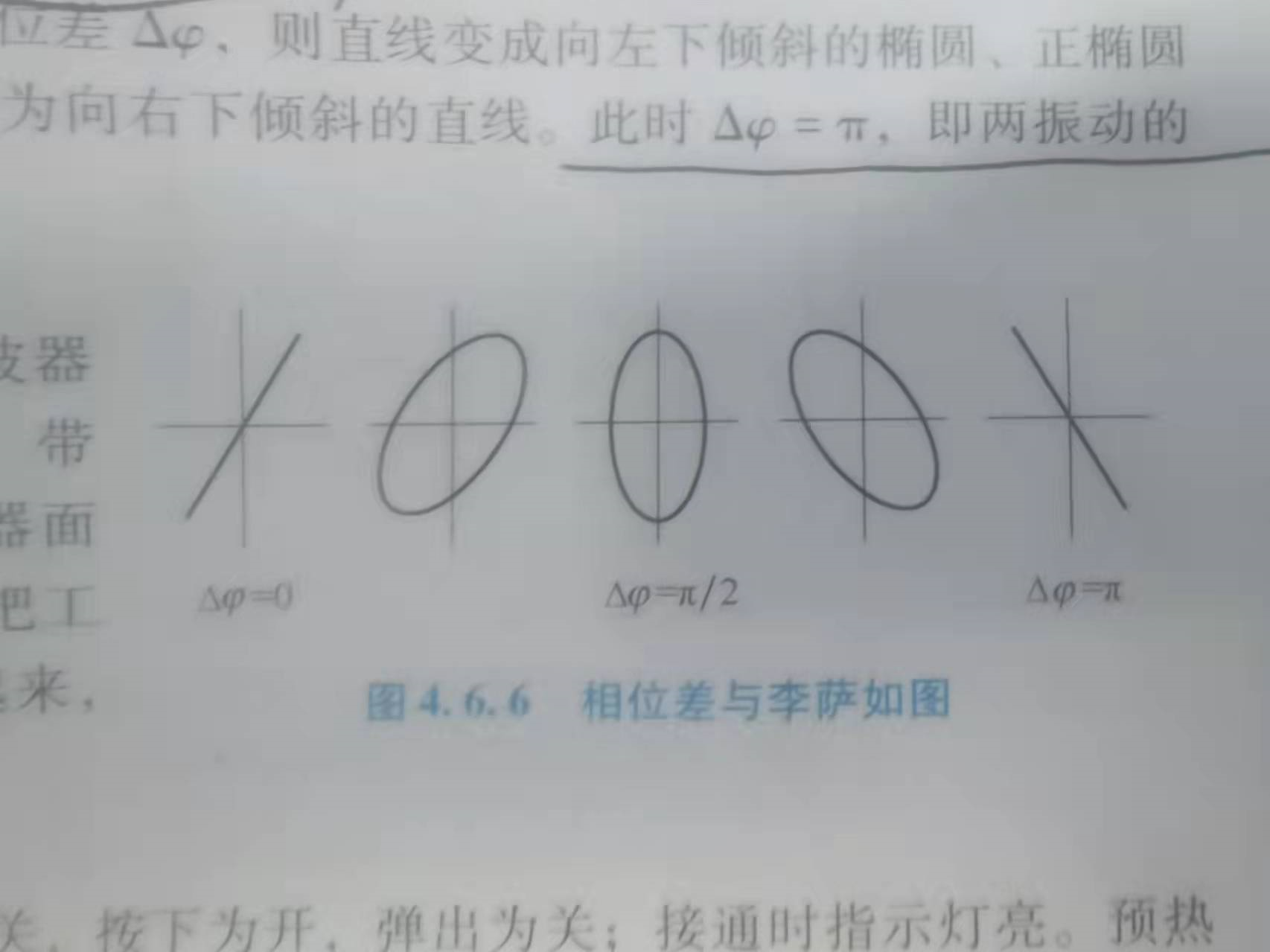
除了这个关键以外,还有关于李萨如图的两个应用,一个是用于测量频率比,有公式如下,其中 分别是水平线与图形相交的最大点数,竖直线与图形相交的最大点数。
另一个应用是用来测量两个输入波形的相位差,有公式如下,其中 是椭圆与 x 轴的交点坐标, 是最大水平偏转距离。
有以下典型图:
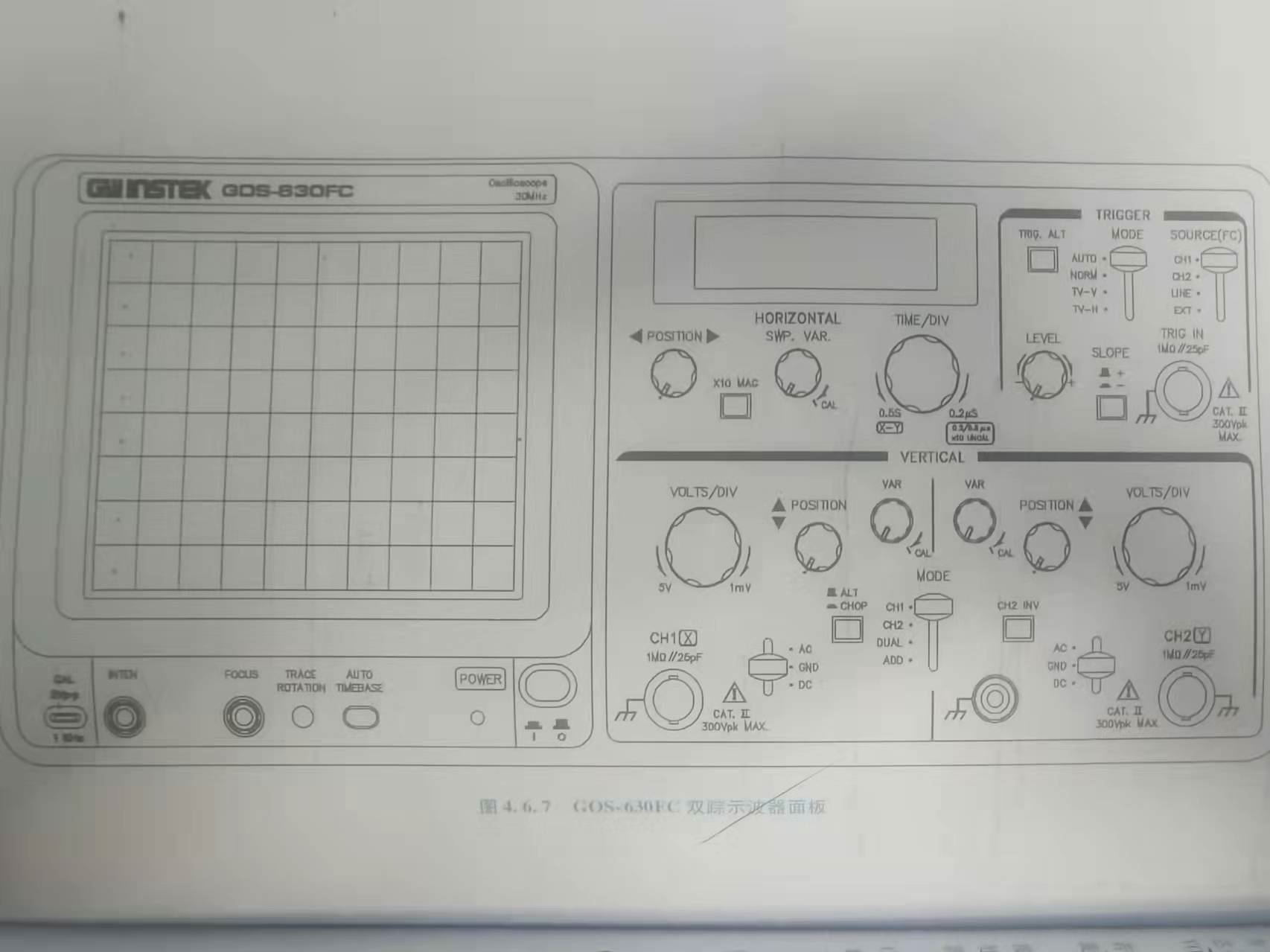
2.2 仪器结构
在这个部分,我会将各个按钮按照功能进行划分,恰好这个面板的按钮布局也是按照这个思路来的。
2.1.1 开机
在开机部分我们的功能按键都集中在左下面:
- power:用于开机。
- inten:用于调节辉度,辉度就是亮度的意思。不可将其调的过量,伤眼而且会使荧光屏变黑,还会损失示波器寿命
- focous:调节清晰度。
2.1.2 输入信号
这个部分集中于中下部和右下部,可以看到,这个部分有明显的对称结构,这是因为这款示波器是双通道(也就是说,可以接受两个输入信号波)的。
关于对于一个信号波的控制,有如下按钮:
- 调节灵敏度:volta/div 用于调节灵敏度,这个可以获得我们在 2.1 中说的灵敏度,var 用于灵敏度的微调(据说当示波器图像不稳定的时候,可以调节这个旋钮),如果真的要进行定量测量,那么就必须将其顺时针旋转到 “CAL” 校准位置。“CHOP” 好像是灵敏度探针,可以将灵敏度提高 10 倍
- 调节垂直位移:用 position 可以调节垂直位移
- 调节耦合方式:输入信号与示波器有 3 种连接方式:
- AC:交流耦合,阻断直流成分。
- DC:直流耦合,阻断交流成分。
- GND:输入端接地,常用于测量基准或寻迹。
关于对两个信号波的联合控制:
- 调节工作方式:MODE
- CH1:屏幕只显示 1 通道信号。
- CH2:屏幕只显示 2 通道信号。
- DUAL:双踪,即屏幕同时显示两个通道信号。
- ADD:叠加,显示两个通道信号之和,如果想显示差,可以将 CH2 反向(通过 CH2 INV)
2.1.3 内置扫描波
这个部分集中于中上部:
- 调节灵敏度:与输入信号的调节类似。
- 调节水平位移:与输入信号类似。
- 转变 X - Y 模式:需要将 time/div 逆时针旋转到最右侧,触发源选择 CH1 或者 EXT
2.1.4 触发调节
只有当输入电压的频率是扫描电压的频率的整数倍的时候,图像才能稳定,不然每一次的扫描的图形的起始位置不同,屏幕上显示的是多个图形在不同位置的叠加,无法观测到稳定的图形。
为了解决这个问题,我们采用了同步触发的方式,即 “只有当 Y 轴信号(或者与 Y 轴信号严格同步的信号)到达确定的某一状态(极性和幅度)后,才触发 X 轴开始扫描”。那么就设计到一个控制触发的问题。这个部分主要集中在右上部:
- 选择触发源:trigger source
- CH1:以 1 通道信号为触发信号
- CH2:以 2 通道信号为触发信号
- LINE:以电源信号为触发信号
- EXT:以外接信号为触发信号,外部信号由 TRIG IN 接入
- 选择触发电平:level,向 “+” 旋转,启动扫描的触发电平上升,反之,下降。调节这个会影响波形的起始位置。
- 选择触发极性:slope,安如为负极性,即下降沿触发,反之,上升沿触发。
- 选择触发方式:MODE
- auto:没有信号输入或信号没有触发同步,依然显示扫描线
- norm:只有触发信号会触发扫描,否则没有扫描线
- 交替耦合:trig alt 应该是双踪模式用的。
2.3 实验操作
- 测量二极管伏安特性的时候,用的是 X - Y 模式,在一个并联电路中
- 测声速的本质是在测波长,有振幅法和相位法两种方法。
三、开尔文电桥法测电阻
3.1 实验原理
惠斯通电桥法测量的一般是中值电阻() 。对于小电阻,因为接触电阻和导线都会有电阻,所以测试就会很不准确。所以我们给出了开尔文双电桥法来测量低值电阻。
这个方法的核心思想有两点:
- 将 的导线电阻和接触电阻巧妙地转移到了电源内阻和阻值很大的桥臂电阻上
- 利用 和 ,就可以忽略修正值的影响。
开尔文双电桥法的原理如图:
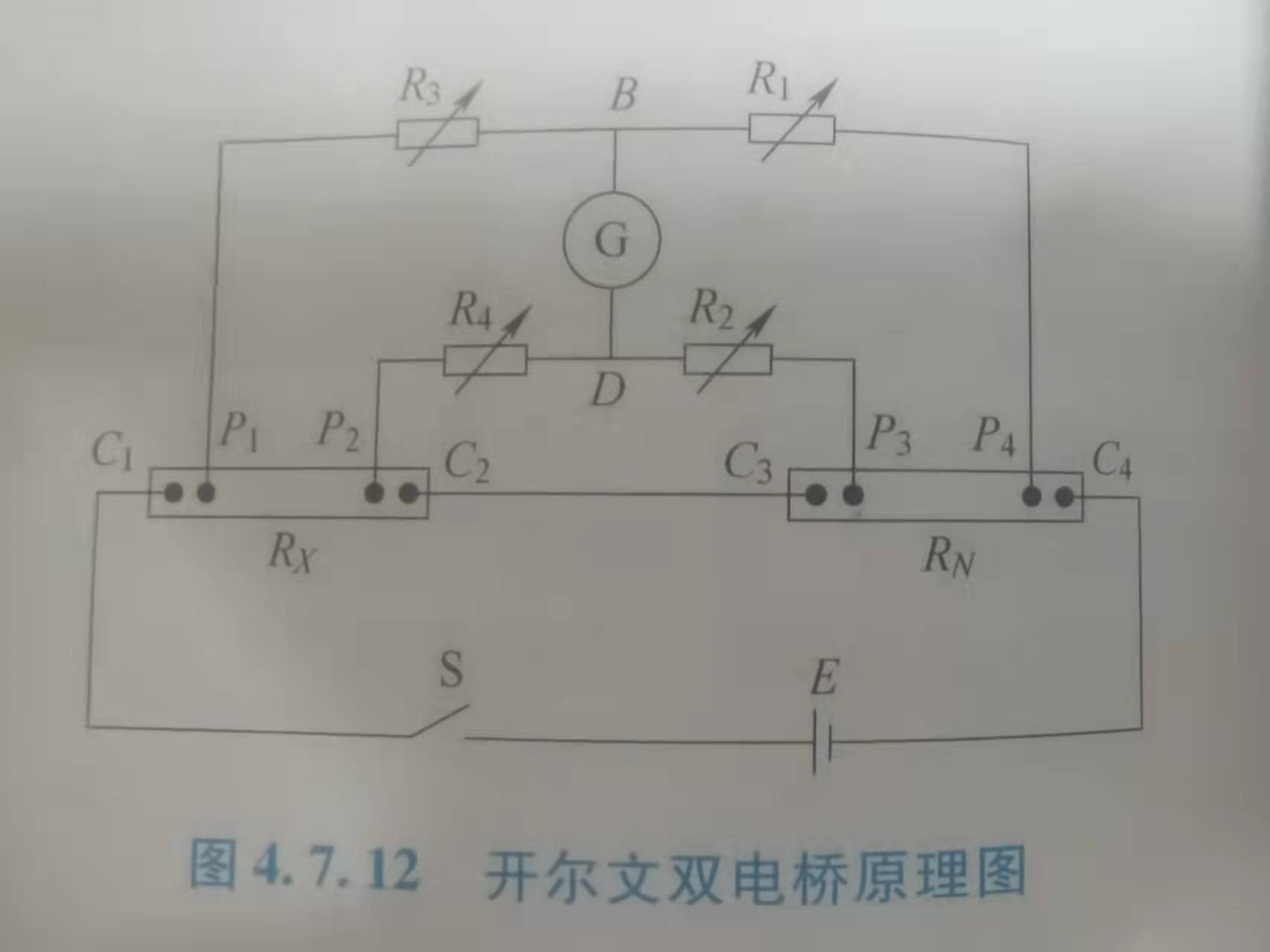
其中 被称为电压接点, 被称为电流接点。然后经过一顿细致的分析,我们会得到下面这张图:
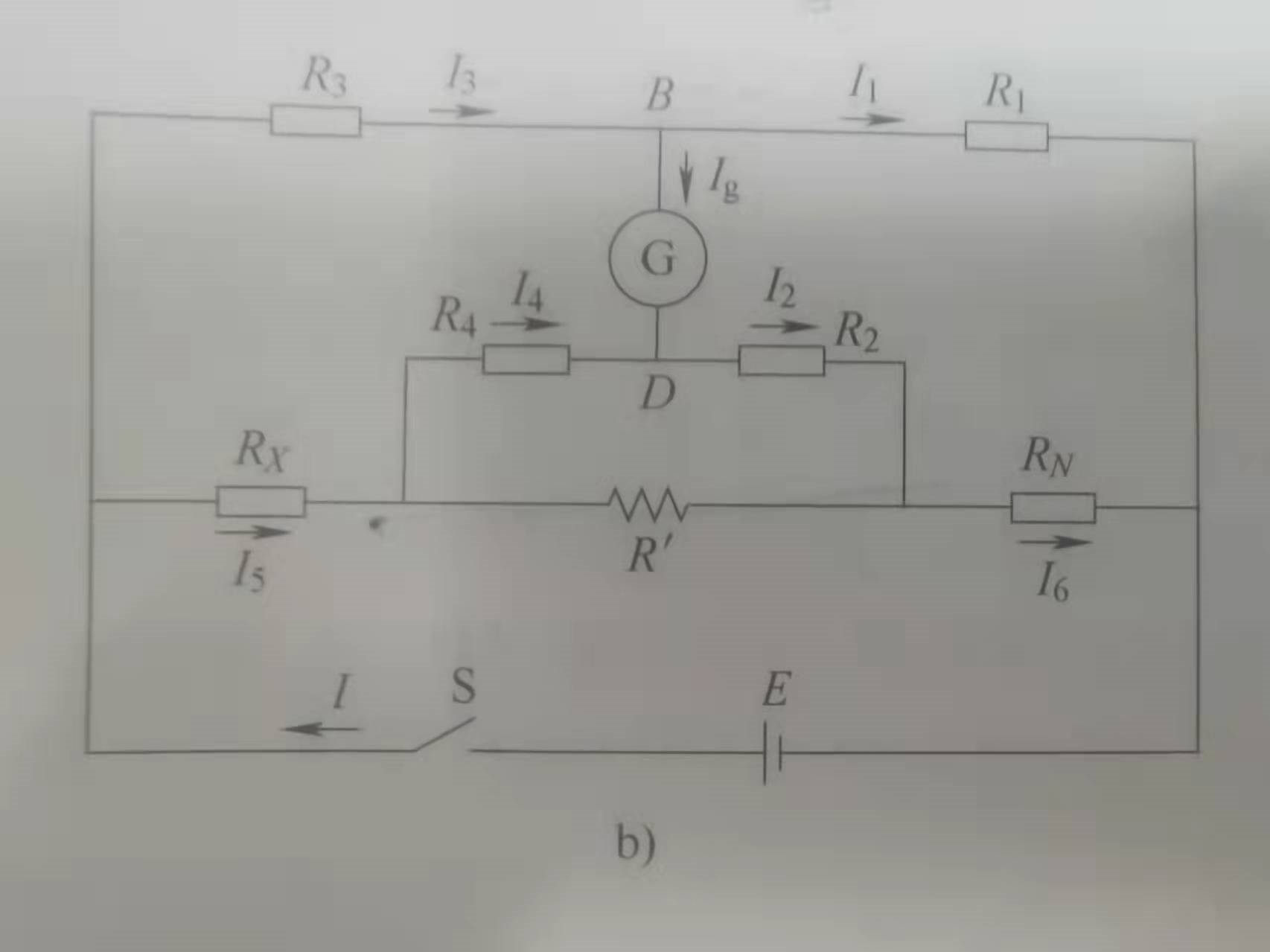
依然是让检流计示数为 0,可以推出等式
当我们让 的时候,就可以获得跟单电桥一样的公式了,即
最后只有一个问题,就是让 可以有很多种方式,我们选择让 ,然后联合调节 ,求出待测电阻的值,即
此时 被称为比较臂电阻, 被称为电桥倍率系数。实验室提供的 QJ19 型单双电桥用的就是这种方法。
3.2 一些问题
- 附加热电动势消除方法:电流正向反向测量取平均值。
四、电位差计及其应用
4.1 实验原理
电位差计是为了精密的测量电压或者电动势(虽然这个实验是测量电动势,但是它也可以测电压),其等价于一个内阻无穷大的电压表。原理图如下:
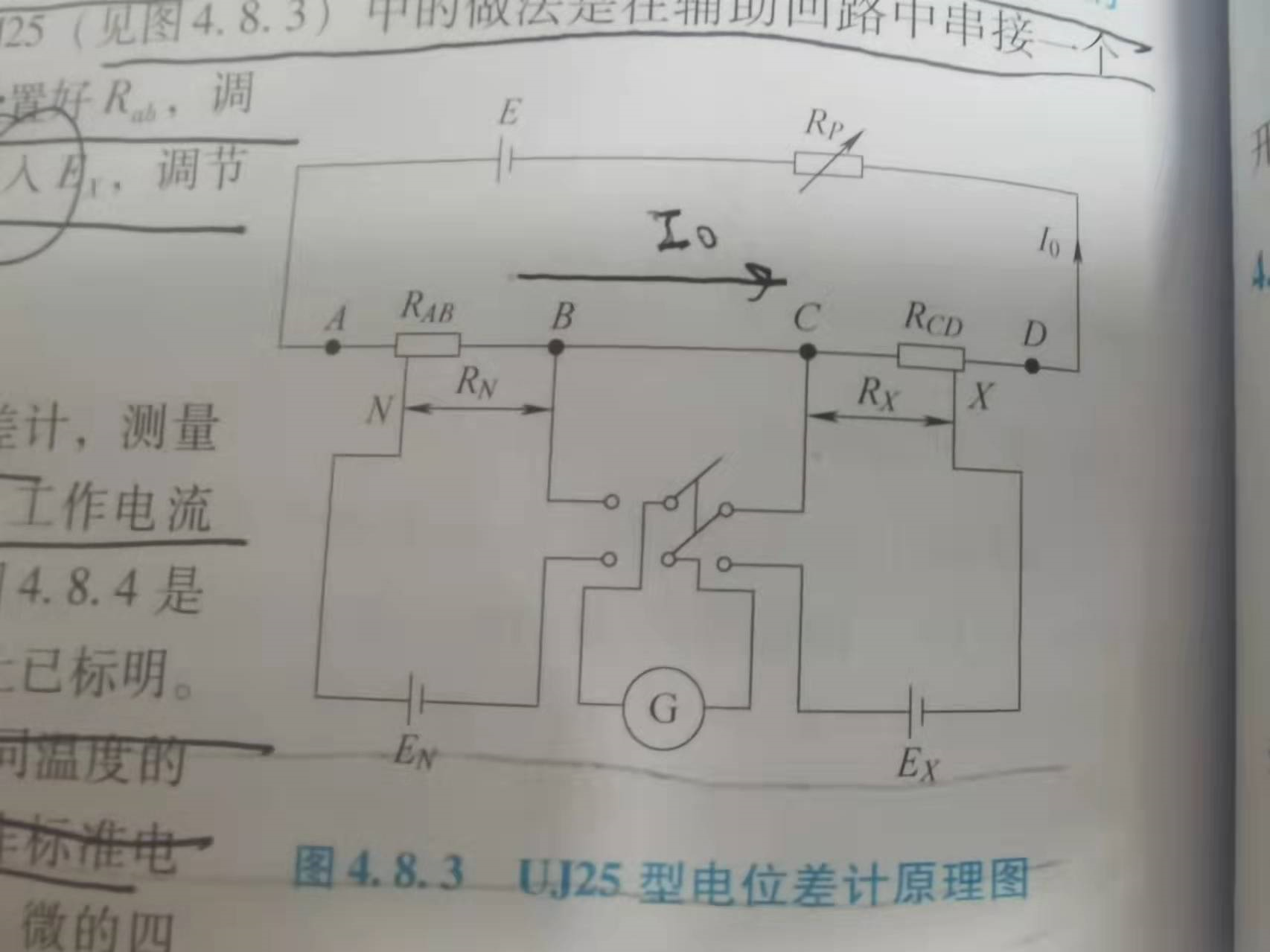
这个图上面的那个回路被称为辅助回路,而下面这两个应该被叫做补偿回路。底下这两个回路,如果是测量状态,那么通过他们的电流应该是 0(被补偿了)。
电位差计之所以复杂,还在于除了上面描述的补偿法之外,它还用了比较测量法,所以这就是为啥底下是两个回路的原因了,因为是需要比较,所以肯定不是测试一个。(其实一个就够了,只需要在辅助回路里安装电流表,让电流乘电阻,就可以得出电动势了)在这个题目中,可以说他先用左下角的那个电路把辅助回路里的电流算了出来(没有真算),然后再求解的右下角,我们真正想知道的电路。
另一个复杂的点是它将辅助回路里的电流标准化了,也就是说,它又绕了一个弯,我们之前说左下角的式子是这个用法
因为 都是已知的,所以电流就可以被算出来了,但是这里变得更负责了。我们要控制 的值。但是一旦控制了这个值。整个辅助回路的总组织就必须确定了,所以我们又引入了 来帮助我们控制。
那么整个实验的步骤是这样的(只是逻辑步骤,会与现实有出入)
- 先由 的值(用温度修正了)确定了
- 瞎估计一个
- 将检流计接入左下电路,此时肯定会有偏转(因为 不等于 ) 。所以就调节 让检流计不发生偏转(之后就不调节 了)
- 将检流计接入右下电路,此时联合调节 ,联合的要求是它俩的和不能变(因为要保证电流不变)
- 得到 ,此时检流计示数变为了 0
4.2 实验仪器
实验仪器如图所示:
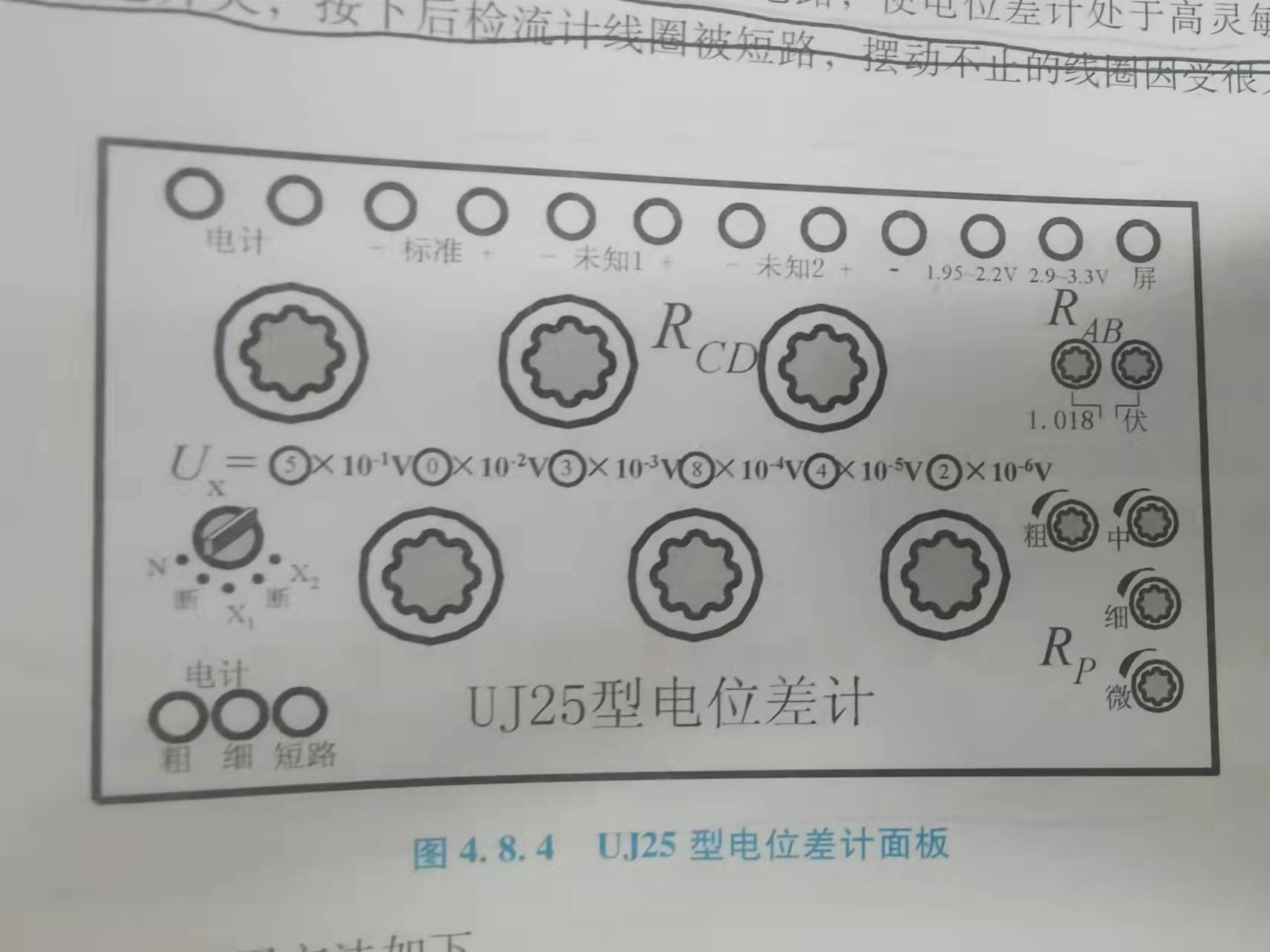
我们分开介绍:
- 上面那一排接线柱
- 电计是用来接入检流计的。
- 标准是用来接入标准电池(应该不是电池)的,提供标准电动势。
- 未知 12 都是用来接入待测的电压的(我们只用一个)
- 是用根据 来调节第一次的 的
- 是用来调节 的。
- 不只是用来调节 ( 是蒙的,粗略估计一下就好了) ,它主要负责联合调节 。说这一不要造成理解上的困难。
- 右面的旋钮是用来控制检流计接入哪一个电路的,断路就是都不接入,N 就是接入左下角电路,X 使用测量未知电路。
- 最右下面的按钮是将检流计接入电路的(上面那个旋钮只是为检流计选定了接入的目标电路,还没有真的接进去)。因为检流计过于敏感,所以直接接太冒失了,所以不能直接接入,有粗接(就是往检流计上串电阻,这样电流就小了)和细接(就是直接接)的区别。短路主要是为了让检流计指针赶快复位。
4.3 灵敏度分析
我还没有弄得太明白,应该是说自己组装的仪器,都需要测一下这个东西,具体的方法就是让检流计偏转一定的个数,然后看此时的结果与原来没偏转时得到的结果的差值的大小,有一个公式
是偏转的个数。那么其灵敏度误差为
为啥用 0.2 格呢?因为这是人眼能分辨的最小格数。
4.4 一些问题
- 如果 怎么调节,检流计均偏向一边?电路无法补偿比如正负极串联或是一方电压过小。
- 检流计均保持不动?可能是开路(好敷衍)。
- 两次补偿的灵敏度一样吗?不一样, 的内阻会大一些,所以灵敏度会差一些。
五、分光仪的调整及其应用
5.1 调整过程
5.1.1 粗调
5.1.2 调整望远镜
- 调焦于无穷远:根据自准直原理,改变目镜与叉丝分划板之间的距离(我不知道为啥),目标是清晰无视差的看清小绿十字。
- 望远镜光轴与仪器主轴垂直:来回旋转反射镜,利用半调法。目标是绿十字一直在上叉丝处。
- 调整叉丝分划板里的纵丝与仪器主轴平行:转动目镜镜筒,让小绿十字与上叉丝重合。
5.1.3 调整平行光管
- 使平行光管产生平行光:前后移动狭缝套筒,在望远镜目镜中无视差地看到边缘清晰的狭缝像的时候,调节完成。
- 光管主光轴与仪器主轴垂直:让其与望远镜光轴重合,使狭缝像中点与中心叉丝重合。
5.1.4 调整三棱镜
- 不能用半调法,因为此时望远镜已经符合要求了。
- 目标都是小绿十字与上叉丝重合。
5.2 误差消除
5.2.1 偏心差
分光仪的主刻度盘和游标盘不可能完全同心,这被称为偏心差。这是仪器本身的系统误差,消除办法是采用对径读数法。
5.2.2 主刻度盘刻度不均匀
消除方法是在刻度盘不同部位进行多次测量。
六、光杠杆法测量弹性模量
6.1 实验原理
弹性模量的公式如下
可以看到,无论是力,还是长度,还是直径,都是可以测出来的。但是只有 是一个难以测量的量(因为它太小了),所以我们实验的重点就是采用光杠杆法将这个微小的形变量测量出来。
6.2 实验仪器
实话实说,这个部分我自己也没弄明白,我搞不清楚到底光线构成的平面是水平的,还是垂直的。实验仪器如图:
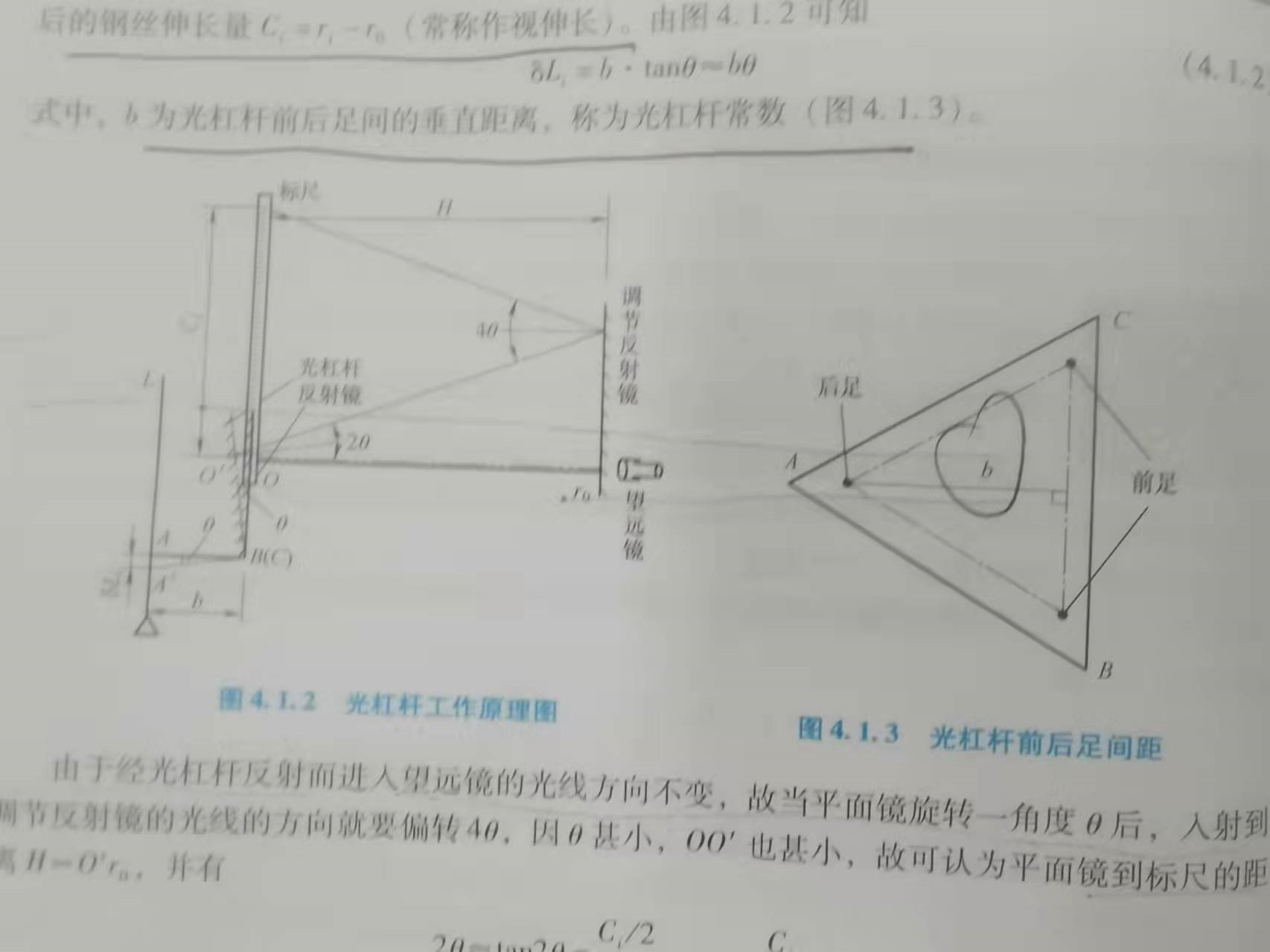
大致意思是说,待测量的钢丝连着后足,如果它伸长了(钢丝底下还连着秤砣,用来算 ),那么后足就向后倾,那么就会让光杠杆反射镜扭转一个角度,然后又通过调节反射镜又扭转了一个角度,最后标尺上的光斑就会移动一个较大的距离,这个被放大过的距离就用来计算伸长量。
最后有公式:
其中 是标尺读数差, 被称为光杠杆的放大率。增大 (也就是望远镜到反射镜的距离),就可以提高放大率。
6.3 实验操作
- 首先是光学系统的调整,因为我没有看懂,所以就不列了。
- 需要在增加拉力和减少拉力过程中各测量一次取平均值,是因为弹性滞后效应。
- 测量结束后,要把拉力全部释放,不然加力装置会受损。