一、感受
这次作业的神经网络是比上一次作业复杂的,上一次作业是“多层感知机(MLP)”,这一次的作业是“卷积神经网络(CNN)”。运算从原来的矩阵乘法变成了卷积,网络结构也更加复杂,所以这次的作业是允许使用框架的。
这次作业的难点本质上是对于卷积网络的理解上,TensorFlow 可以提供卷积的计算方式还有后窥修正,所需要书写的只是网络结构。次难点是 TensorFlow 的工作机理,其实一开始做的时候如果能对 TensorFlow 有一个好的理解,写起来大概 40 分钟就够了(但是学习上面这俩东西花了整整一天)。
二、卷积神经网络
2.1 卷积层
卷积运算利用一个输入矩阵和一个卷积核进行运算,卷积核会在输入矩阵上运动,然后每次都进行与输入矩阵的点对点的乘法(数学上还需要旋转卷积核 180 度,但是实现的时候不需要,因为反正也是随机的),大概如下:
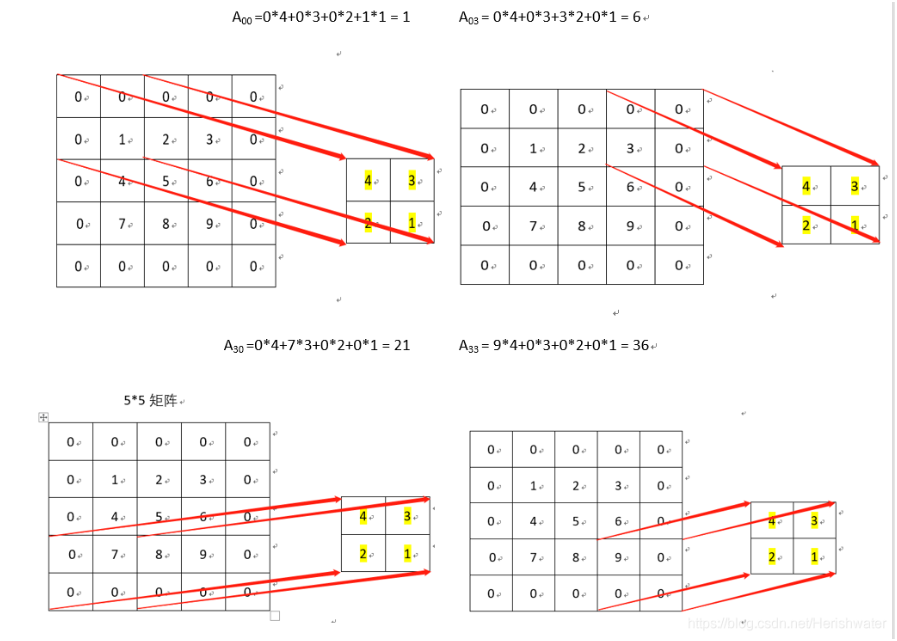
关于卷积为啥要比普通的矩阵乘法(线性变化)要更加优异,我的同学说过,卷积会重复的利用输入矩阵中的信息,而且每个信息的贡献是不等的,边缘的贡献会小一些,而且卷积核这种东西本身的权重就很有灵性,而且可能有更好的数学理论支持。
如果再细说,确实感知机模型在数学上是可以完成拟合的,本质类似于用多项式模拟函数。但是这会导致训练数据集的很大,这是因为本来这件事情就是很困难的事情,但是复杂的神经网络会加入一些假设,正是由于这些假设,导致了我们可以用很小的数据集训练出很高准确率的网络。
以卷积神经网络为例,对于普通的感知机,如果想识别人脸,需要“人脸出现在图片中央,人脸出现在图片角落,人脸出现在图片次中心”等一系列数据,但是卷积神经网络就没有这个限制,卷积的计算方法会天然就可以将这些情况考虑进去。
不同的神经网络有不同的特性,对应不同的假设,如
- RNN: 时间点和时间点是相关的
- CNN: 图片相邻的像素是相关的
- Encoder-Decoder: 一个图片的信息可以压缩
- UNet: 浅层神经网络对图像边界的理解比深层神经网络好
- Dropout: 数据噪声没有意义
- 各种 attention: 图片某些位置要仔细看
- 各种 context: 图片中全局的信息很重要
不过卷积的特性就是,乘法运算的次数会大大增加(一个输入元素被算了不止一遍),所以才需要池化层和硬件加速器。
2.2 池化层
池化是为了减少卷积输入矩阵的大小而存在的,其基本原理如下:
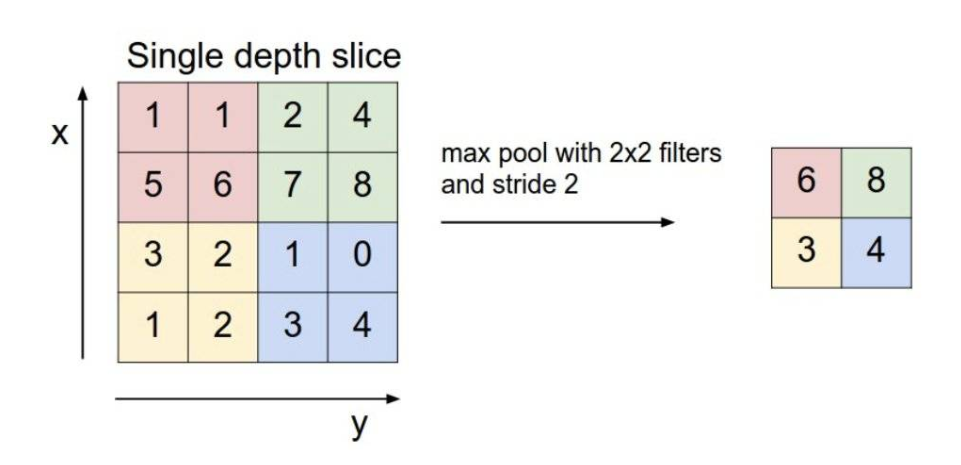
对于一个输入矩阵,我们用一个视窗在上面移动,然后从每个视窗中用某种方法获得一个值,然后输出成输出矩阵的一个元素,上图采用的方法是在视窗中挑一个最大的元素当输出,所以叫做 max pool,常用的还有 avg pool ,是取平均值的意思。
经过池化处理,矩阵会变小,其功能有:
- 抑制噪声,降低信息冗余
- 提升模型的尺度不变性、旋转不变形
- 降低模型计算量
- 防止过拟合
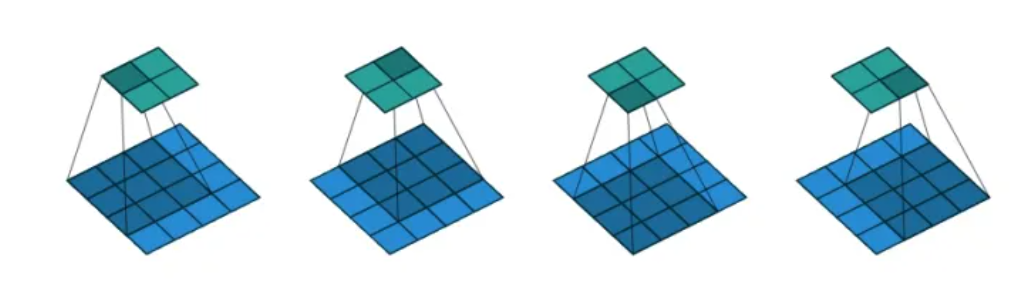
需要强调的是,视窗的移动不一定不覆盖,如下图所示
2.3 其他概念
那个移动的视窗也被叫做滤波器(filter),每次移动的步幅叫做步长(stride),另外在卷积中,为了保证输入矩阵和输出矩阵的大小不发生变化(或者可控的变化),我们有在输入矩阵边缘补零(padding)的操作。正如多层感知机会有一个 b 的值在完成线性映射后,卷积神经网络也是有这样的值的,我们称之为偏置单元(bias)
三、LeNet
3.1 总论
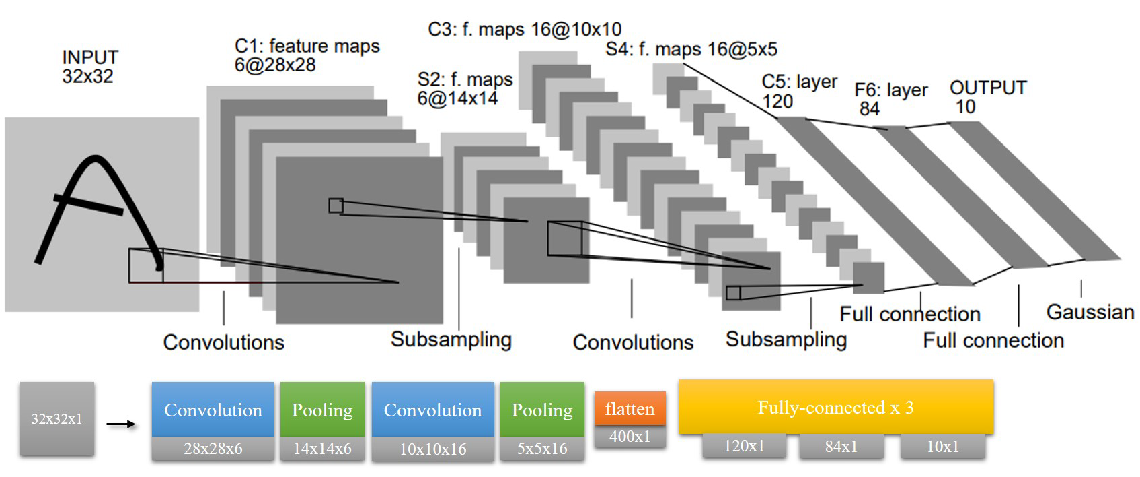
LeNet 是一个经典的卷积网络,有神经网络界的 “Hello, world” 之称,所以网上资料还是很多的。可以大量的查阅资料。
3.2 输入
虽然在经典的这张图中,一张图片的大小事 32 x 32 的,但是实际在 mnist 数据集中,一张图片的大小是 28 x 28 ,所以可以采用 padding 补零的方法让后续操作不太改变。
通过给定的输入处理函数,我们最终会获得 3 个四维的张量,分别是训练集(train),验证集(validation),测试集(test)。其四个维度为 [batch, height, width, channel] ,其中 batch 为批量之意,在这里是图片数,这里我们的训练集的 batch 为 55000, 验证集的 batch 为 5000,测试集的 batch 为 1000 ,height, width 是图片的高和宽,这里均为 28 ,channel 是通道之意,因为是黑白照片,所以 channel = 1 恒成立(如果是 RGB 彩色图片,则 channel = 3)。
3.3 Conv1
卷积层的搭建需要用到 TensorFlow 中的函数,如下示例
tf.nn.conv2d(input, filter, strides, padding)其中 input 为输入的四维张量,很好理解。
filter 是卷积核的参数,为一个 4 维张量(不是 4 元素向量),每一维格式如下 [长,宽,输入通道数,深度] 。输入通道数应当与 input 的通道数相同,这里是 1,深度(输出通道数)自定,我们这里需要 6 张图(和上面一样,所以为 6),最终代码如下
# 5 * 5 采样窗口,6 个卷积核从 1 个平面抽取特征
conv1_w = self.init_weight([5, 5, 1, 6])上述代码说明了我们生成了 5 x 5 的输出 6 通道的卷积核(本质应该是 6 个二维矩阵作为卷积核)。
因为最后有 6 张图,所以我们需要 6 个偏置单元
conv1_b = self.init_bias([6])和感知器一样,我们需要选择一个激活函数,我们选择 relu ,这个的选择后面会有讨论
conv2_h = self.relu(self.conv2d(pool1_h, conv2_w), conv2_b)其中的 self.conv2d 是这样的
def conv2d(x, W):
"""
param x: input tensor of shape [batch, in_height_, in_weight, in_channels]
param W: filter tensor of shape [filter_height, filter_width, in_channels, out_channels]
return: 一组卷积核
"""
# strides 是步长的意思,是 strides[1] 代表 x 方向的步长,strides[2] 代表 y 方向的步长
# padding 即补齐方式,SAME 不会造成输出的矩阵变小(卷积的自然情况),valid 会
return tf.nn.conv2d(x, W, strides=[1, 1, 1, 1], padding='SAME')关于步长和补齐,有
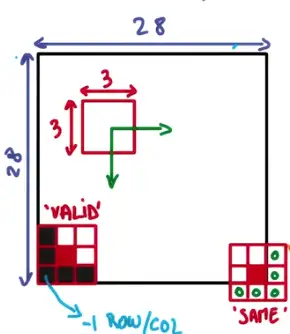
其中 stride 作为一个四元数组,stride[0], stride[3] = 1 是常态,这里采用 padding = 'SAME' 的操作,就是为了适应图片是 28 x 28 的特殊性。
设输入图像尺寸为 W,卷积核尺寸为 F,步幅为 S,Padding 使用 P,则经过卷积层或池化层之后的图像尺寸为(W-F+2P)/ S + 1
- 如果参数是
SAME,那么计算只与步长有关,直接除以步长 W / S (除不尽,向上取整) - 如果参数是
VALID,那么计算公式如上:(W – F + 1) / S (结果向上取整)
经过这一层,一张图片被转换成了 6 张 28 x 28 的 feature map。
3.4 Pool1
池化层的标准都比较统一,有代码
pool1_h = self.max_pool(conv1_h)
def max_pool(x):
"""
返回一组池化核
"""
# ksize [1,x,y,1] x,y 为池化窗口大小
return tf.nn.max_pool(x, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')可以看到我们用到的池化层都是每 2 x 2 的窗口中取最大值,然后紧密但是无覆盖的遍历的,并且有补齐操作。这就导致经过池化层后,输入的高和宽都会变为原来的 $\frac12$ 。
经过这一层,6 张 28 x 28 的 feature map 变成了 6 张 14 x 14 的 feature map。
3.5 Conv2
# 5 * 5 采样窗口,16 个卷积核从 6 个平面抽取特征
conv2_w = self.init_weight([5, 5, 6, 16])
conv2_b = self.init_bias([16])
conv2_h = self.relu(self.conv2d(pool1_h, conv2_w), conv2_b)结构与 Conv1 类似。
经过这一层, 6 张 14 x 14 的 feature map 变成了 16 张 14 x 14 的 feature map。这里再次与官方的图发生了差异,这是因为原有代码这里肯定没有 padding,但是我 padding 了(使用了课程组提供的函数)。
3.6 Pool2
结构与 Pool1 类似
# layer 4 construct the pool2
pool2_h = self.max_pool(conv2_h)经过这一层,16 张 14 x 14 的 feature map 变成了 16 张 7 x 7 的 feature map。
3.7 Flatten
我们需要在这里加装一个多层感知机,所以第一步是将原来的四维张量(注意,我们讨论的时候只说了后三维,第一维是图片个数,比较朴素)展成二维张量(其实本质是一维,第一维依然是图片个数),如下实例
# 第四步得到的结果拉伸为 1 个一维向量,其长度为 7 ∗ 7 ∗ 16 = 784
pool2_h_flat = tf.reshape(pool2_h, [-1, 7 * 7 * 16])其中 reshape 的用法与 numpy 库类似,-1 代表缺省,需要根据其他维度进行计算。
经过这一层,我们得到了 784 的一维输入。
3.8 Fc1
fc1_w = self.init_weight([7 * 7 * 16, 120])
fc1_b = self.init_bias([120])
# matmul 是矩阵乘法的意思
fc1_h = self.relu(tf.matmul(pool2_h_flat, fc1_w), fc1_b)这里用 TensorFlow 的形式重新搭建了一遍,感觉十分新奇。
经过这层,784 个输入节点转换成了 120 个隐层节点。可以说从这里开始,又与标准的 LeNet 重合了。
3.9 Fc2
与 Fc1 结构类似
fc2_w = self.init_weight([120, 84])
fc2_b = self.init_bias([84])
fc2_h = self.relu(tf.matmul(fc1_h, fc2_w), fc2_b)经过这一层,120 个隐层节点转换成了 84 个隐层节点。
3.9 Fc3
与 Fc1 结构类似
# output layer
fc3_w = self.init_weight([84, 10])
fc3_b = self.init_bias([10])
fc3_h = tf.nn.sigmoid(tf.matmul(fc2_h, fc3_w) + fc3_b) # 输出层使用 sigmod 作为激活函数输出这层的特殊之处在于激活函数换成了 sigmoid ,这个效果要远好于 rellu。
经过这一层,84 个隐层节点变成了 10 个输出节点。
四、TensorFlow
4.1 张量 Tensor
张量就是多维矩阵的意思,从上面的分析可知,LeNet 用 TensorFlow 实现是很恰当的。
4.2 Session 和 Computational Graph
对于 TensorFlow,我们大量的运算(看似的运算),其实不是在运算,而是在写一个运算结构,比如说我们搭建的神经网络,其实上面写的东西,并没有实际运算,而是搭建成了这样的一个网络
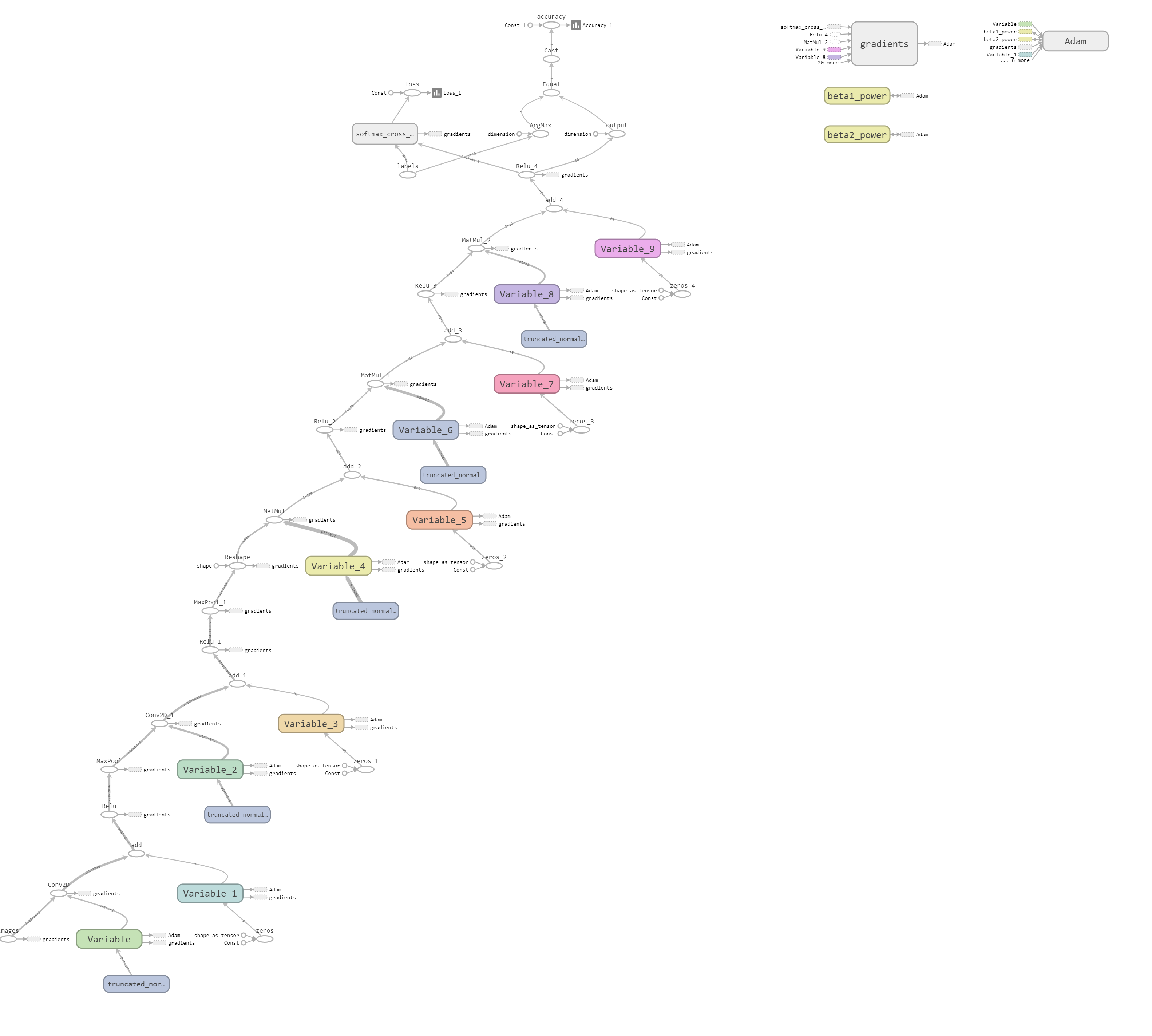
是一个像表达式树的东西,我们需要利用“对话(session)” 来运行这个结构。
计算图包含数据(data,也就是各种Tensor)和操作(operation)。一个模型中的每一个数据或者操作都是图中的一个节点,箭头代表了数据流动的方向。上文提到的用Session计算的过程实际上就是数据流经整个图,计算出每一个节点的数值。
4.3 数据类型
4.3.1 类型需求
对于一个模型,大致有这样几种数据类型需求:
- 可更新的参数:包括权重(weights),偏置项(bias)。这些参数将在训练过程中不断更新。
- 独立于模型存在的数据:数据集中的数据需要“喂给”网络,包括输入数据、输出端的数据(输出的数据会用于反馈)。这个过程就像数学课本中给函数f(x)求值的过程,给x不同的值,求得不同的结果。可以想见,我们需要一个类似“容器”的对象,每次将数据放进去,然后计算整幅计算图。
- 常量。
- 操作符。
因此,我们有了这样的几种数据:
4.3.2 Variable
变量”是可以在程序运行过程中被改变的量,因此模型中的权重、偏置项等均使用此类型。从代码中可以看到,是这样的
@staticmethod
def init_weight(shape):
"""
Init weight parameter.
shape 是一个元组,用于描述矩阵的维度
"""
w = tf.random.truncated_normal(shape=shape, mean=0, stddev=0.1)
return tf.Variable(w)
@staticmethod
def init_bias(shape):
"""
Init bias parameter.
偏置单元(bias unit),在 y = wx + b中,b 表示函数在 y 轴上的截距,控制着函数偏离原点的距离
"""
b = tf.zeros(shape)
return tf.Variable(b)需要注意的是,Variable 有一个初始化的过程,也就是 tf_mnist.py 中的这个代码
sess.run(tf.global_variables_initializer())4.3.3 Placeholder
这个就是前面说的类似“容器”的对象,顾名思义,占位符就是先在模型中”占位“,至于这个位置填入的数值,在Session运行的时候再指定。我们的输入是 Placeholder
images = tf.placeholder(dtype=tf.float32, shape=[None, 28, 28, 1], name='images')
labels = tf.placeholder(dtype=tf.float32, shape=[None, 10], name='labels')对于这种容器,我们需要在运行的时候“投喂”他,也就是这里的代码
_, loss, loss_summary = sess.run([training_operation, loss_operation, merge_summary],
feed_dict={images:batch_train_images,labels:batch_train_labels})4.3.4 Operator
这个东西似乎包括的挺多的,一开始我模型的时候,以为没有设置前向传播和后向反馈的机制,但是后来发现不是在网络里实现的,而是在网络外部实现的,代码如下
# get loss
cross_entropy = tf.nn.softmax_cross_entropy_with_logits(logits=out, labels=labels)
loss_operation = tf.reduce_mean(cross_entropy, name="loss")
# set up the optimizer and optimize the parameters
optimizer = tf.train.AdamOptimizer(learning_rate=lr)
training_operation = optimizer.minimize(loss_operation)
# post-processing, get accuracy
prediction = tf.argmax(out, axis=1, name='output')
correct_prediction = tf.equal(prediction, tf.argmax(labels, axis=1))
accuracy_operation = tf.reduce_mean(tf.cast(correct_prediction, tf.float32), name="accuracy")这些运算符规定了误差的计算方式、优化器的种类,精确度的计算方式,可以说很神奇了。
五、实验结果
因为我的电脑刚装了 vitis ,导致在运行其他程序的时候经常缺失一大堆库,我努力了俩小时,到现在都没有运行起来 TensorBoard。所以可视化的图用的是同学的。
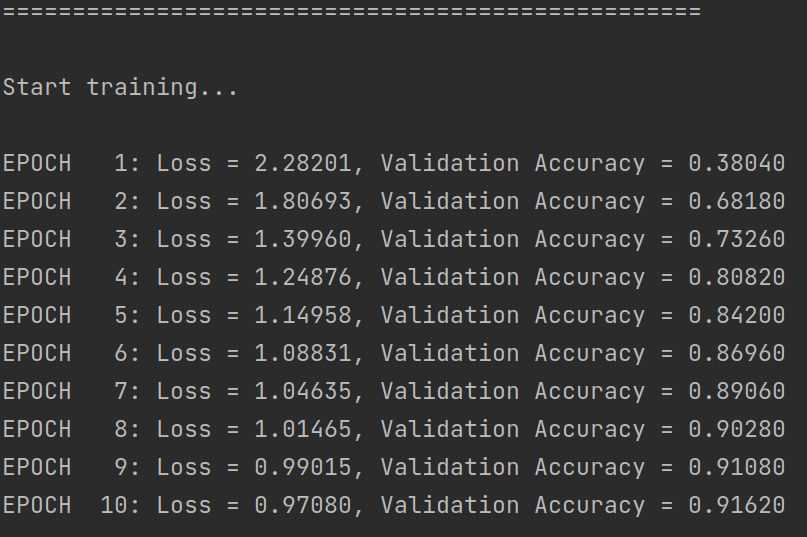
5.1 训练过程
训练过程截图:
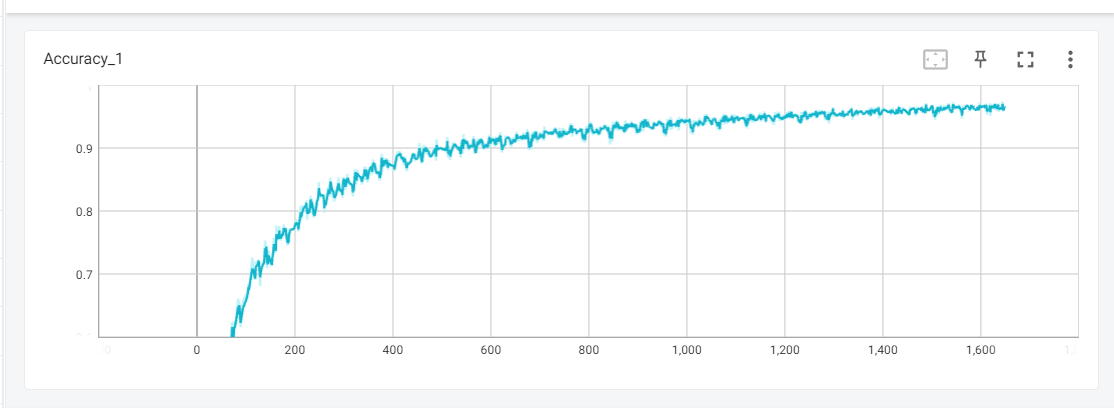
准确率变化:
loss 变化
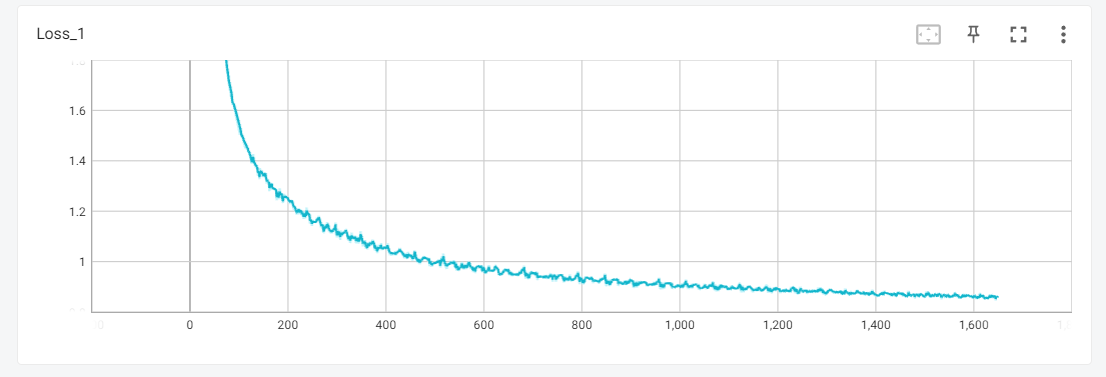
5.2 实验结果
2 号实验结果截图:
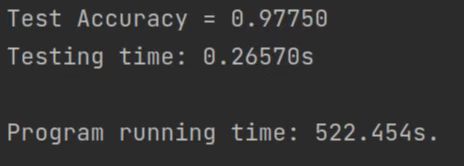
不同参数数据
| 编号 | epoch | 激活函数 | 运行时间(s) | 准确率(%) |
|---|---|---|---|---|
| 1 | 100 | 最后一层为 tanh,其余为 relu | 486.825 | 98.430 |
| 2 | 100 | 最后一层为 sigmoid,其余为 relu | 522.454 | 97.750 |
| 3 | 30 | 最后一层为 sigmoid,其余为 relu | 146.511 | 96.510 |
| 4 | 30 | 均为 relu | 151.085 | 69.490 |
5.3 激活函数的选择
之所以讨论这个问题,是因为我的同学敲代码的时候将最后一层本来的 sigmoid 敲成 relu,然后导致她的正确率一直是 40% 多,最后我俩一起 de 了这个 bug,然后对激活函数的影响有了深刻认识。
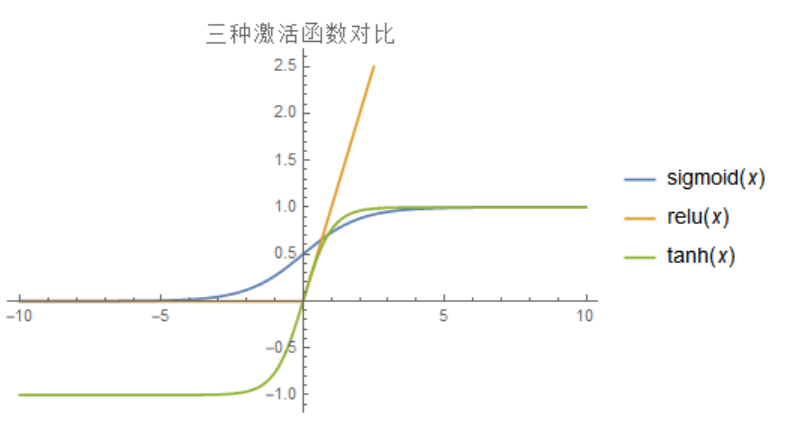
总的来说,不同的激活函数对与学习速度,过拟合现象,死神经现象都有影响,导致最终对于正确率也有一定的影响,比较详细的是和激活函数的梯度有关系,当然也和均值啥的有关系,我找到一篇写得很好的帖子,附在这里 详解激活函数 。另外并不是准确率越高越好,还要考虑训练时间、训练规模等因素。
在这个数据集和网络下,激活函数可以绘图如下
