这篇工作比较缝合,它引用了 3 个 idea:
- Flash Attention 和 pass 抽象
- TeAAL 和它使用的 Einsum 规范
- Extended Einsum
TeAAL 提出用 Einsum 的形式去描述算子,并指导加速器的设计。但是 Einsum 只能描述仅包含加法和乘法的算子,对于 Flash-Attension 这种包含指数运算(softmax)和迭代运算的算子无法描述,于是作者借用了 Extended Einsum 的形式描述了 Flash Attension 算子并实现了 FuseMax 加速器,同时论证了 pass 抽象的合理性。
而实际上,TeAAL 提出的用 Einsum 指导加速器设计的思路并没有因为使用了 Extended Einsum 而被拓展;FuseMax 所展现的性能优势,大部分来自于 Flash-Attension 算法本身,而不是其硬件实现。
一、Background
1.1 Flash Attention, Pass
Flash-Attention 是一种 Attention 算子的实现,相比于传统的实现,它可以降低内存带宽的需求,并且使用更少的片上内存,更适合当前加速器存在的 memory bound。为了达到这个目的,我们需要:
- 尽可能少的从内存中读取数据 -> 算法设计的 pass 数要少
- 尽可能少使用片上内存 -> tile 后 reduce
而这两个需求都被 softmax 的传统实现阻止了,softmax 的表达式如下:

传统的 softmax 实现是一种 3-pass 的实现:
所谓的 pass,就是需要访问输入的次数:
the number of times a given element of an input must be revisited after visiting every other element of the input.
因为 softmax 需要先遍历所有元素计算出 max 值,然后根据 max 值遍历所有元素计算分母,再根据分母计算分子。
在 flash-attention 之前,有 2018 online-softmax 工作,将算法优化成了 2-pass 的。他将第 1,2 轮进行了合并:
最终结果如图:
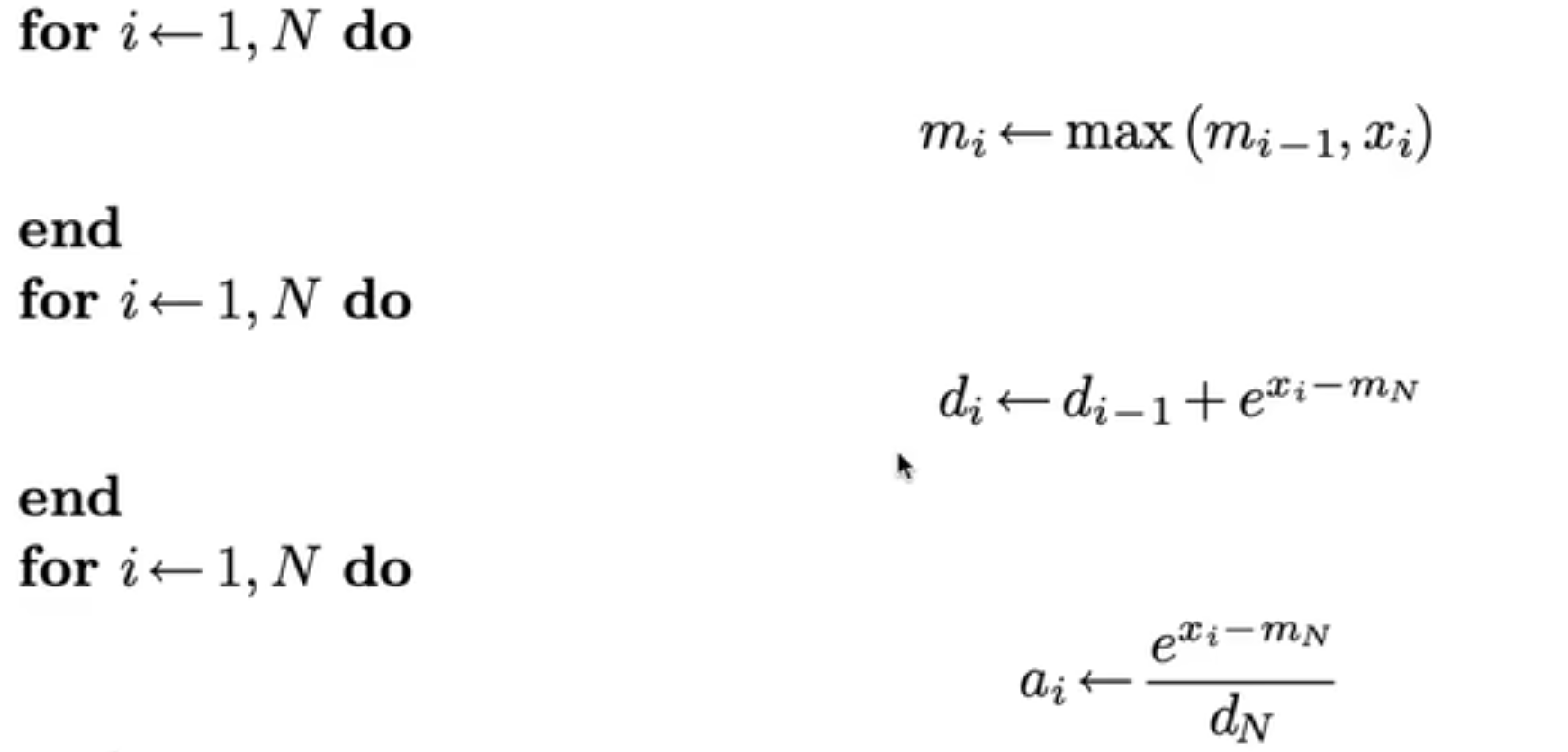
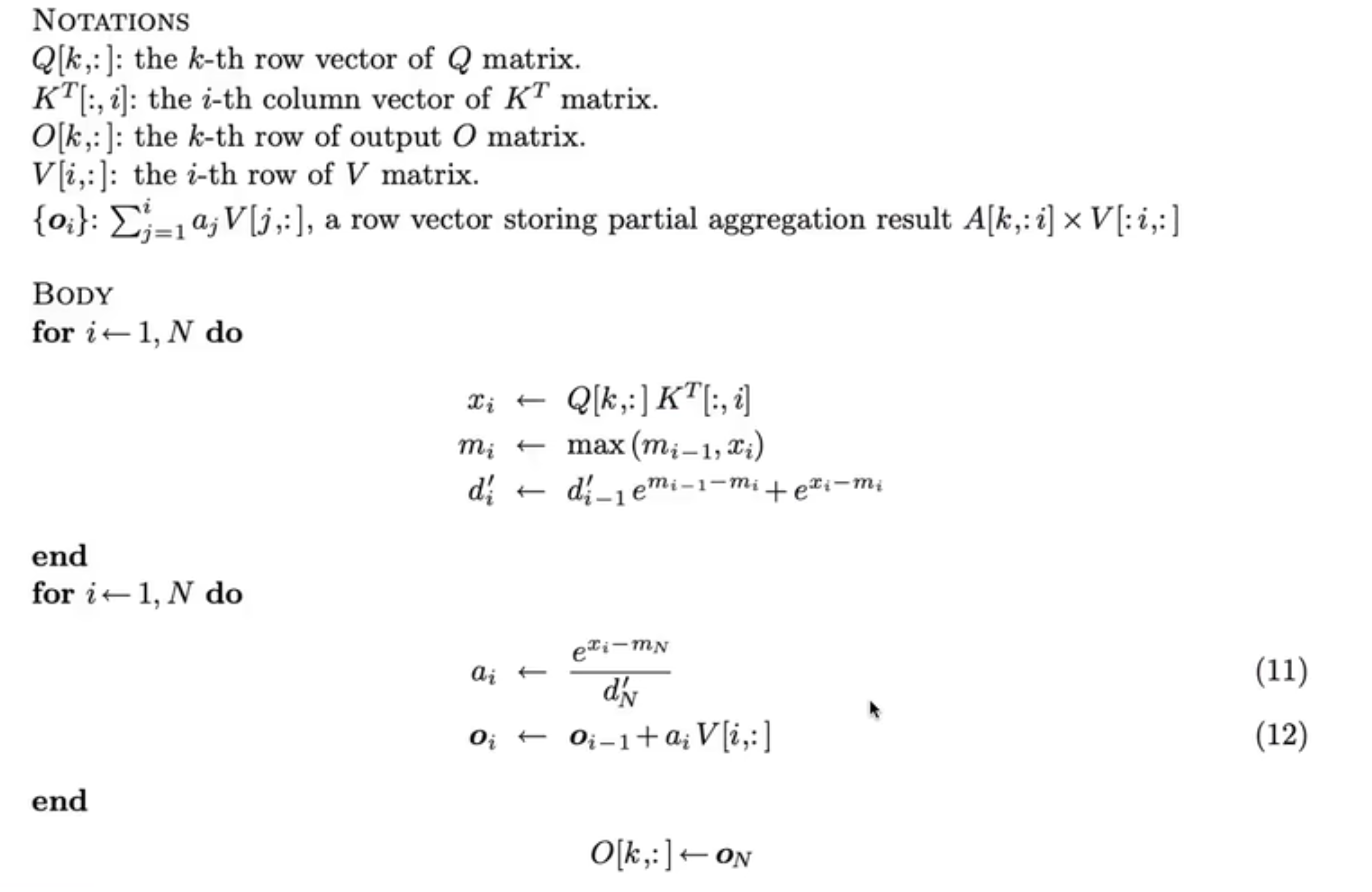
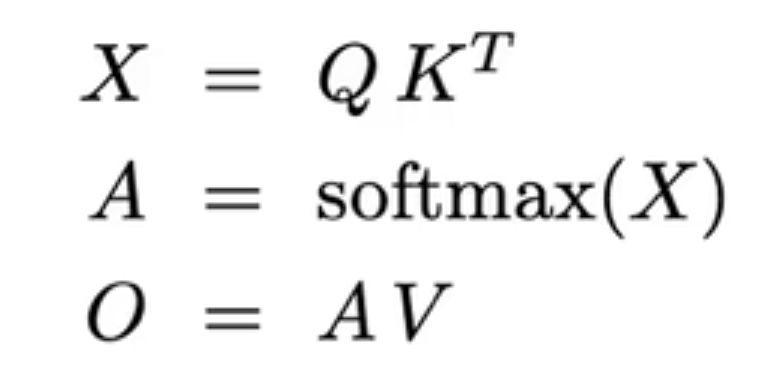
如果仅在 softmax 层,那么 2-pass 就是极限了,不过如果考虑整个 Attention,那么是可以继续优化成 1-pass 的算法,这就是 Flash-Attention,2-pass 的 Attention 表示如下:
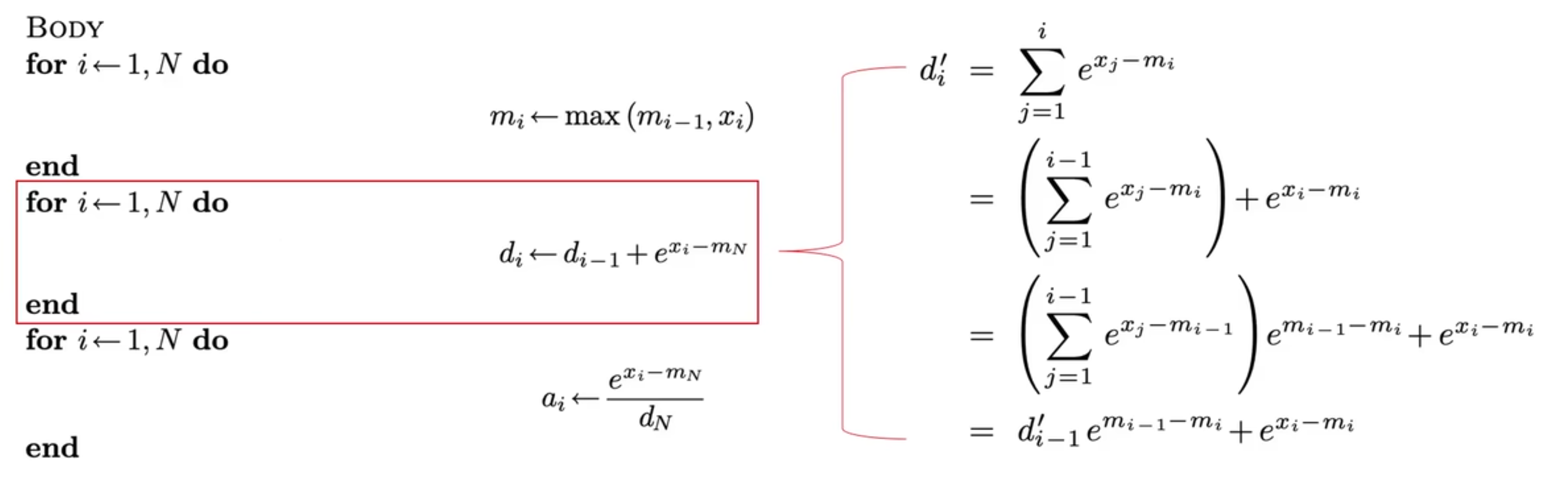
然后我们注意到(直观上说,是利用了 a 这个数组并不是最终结果,而是会被 reduce 的性质):
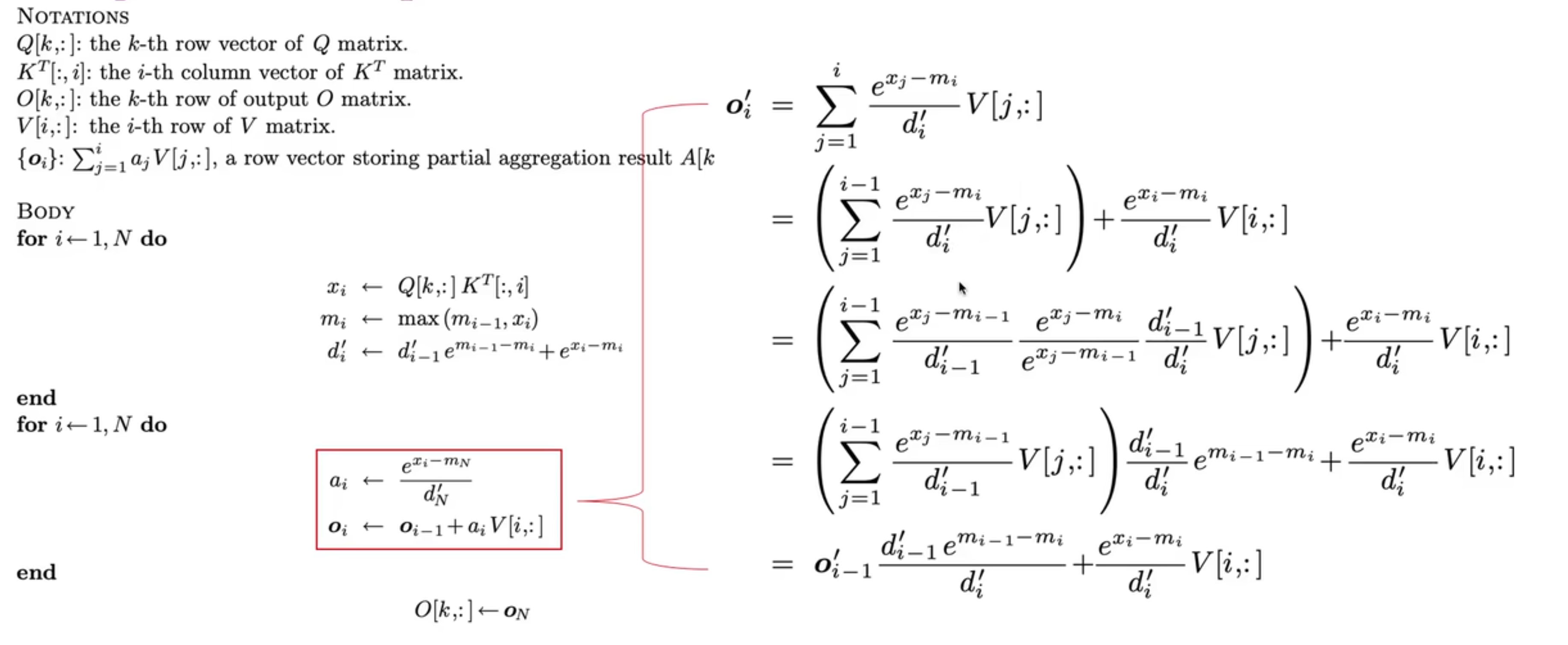
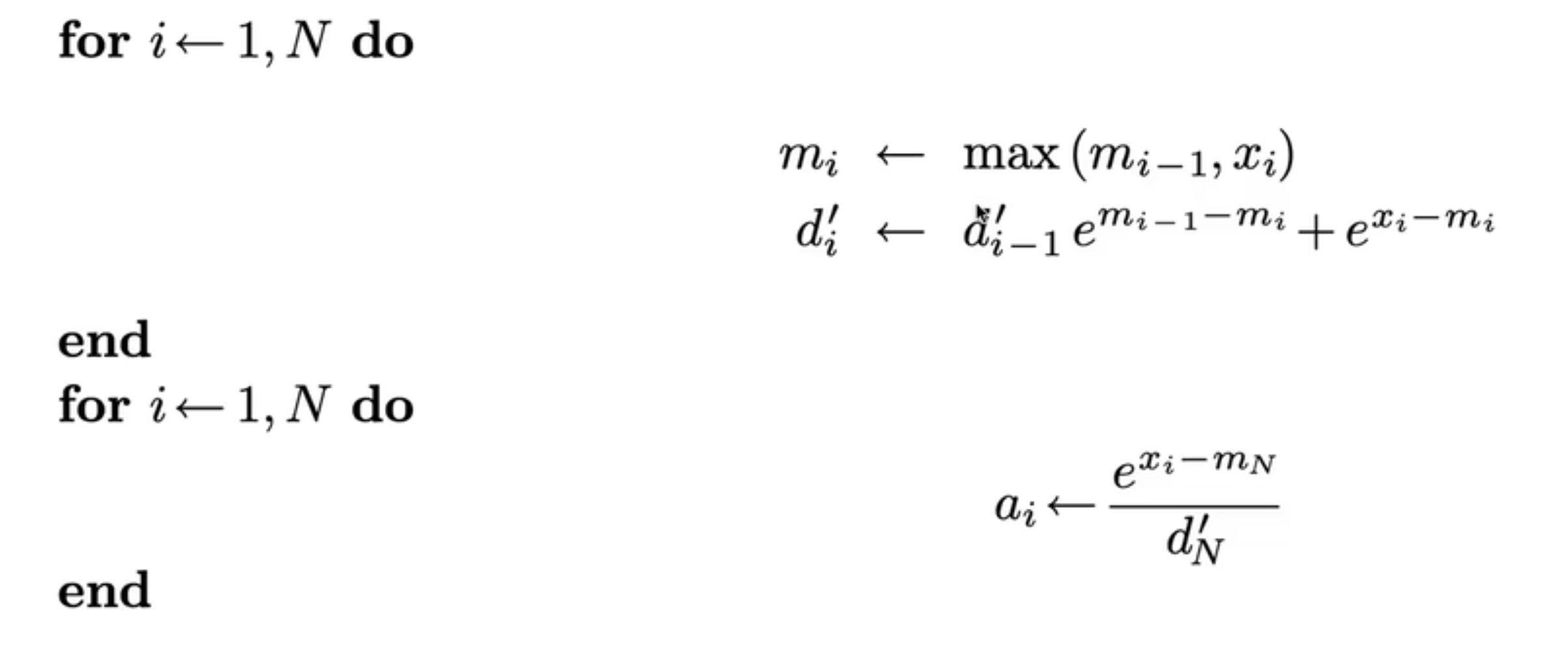
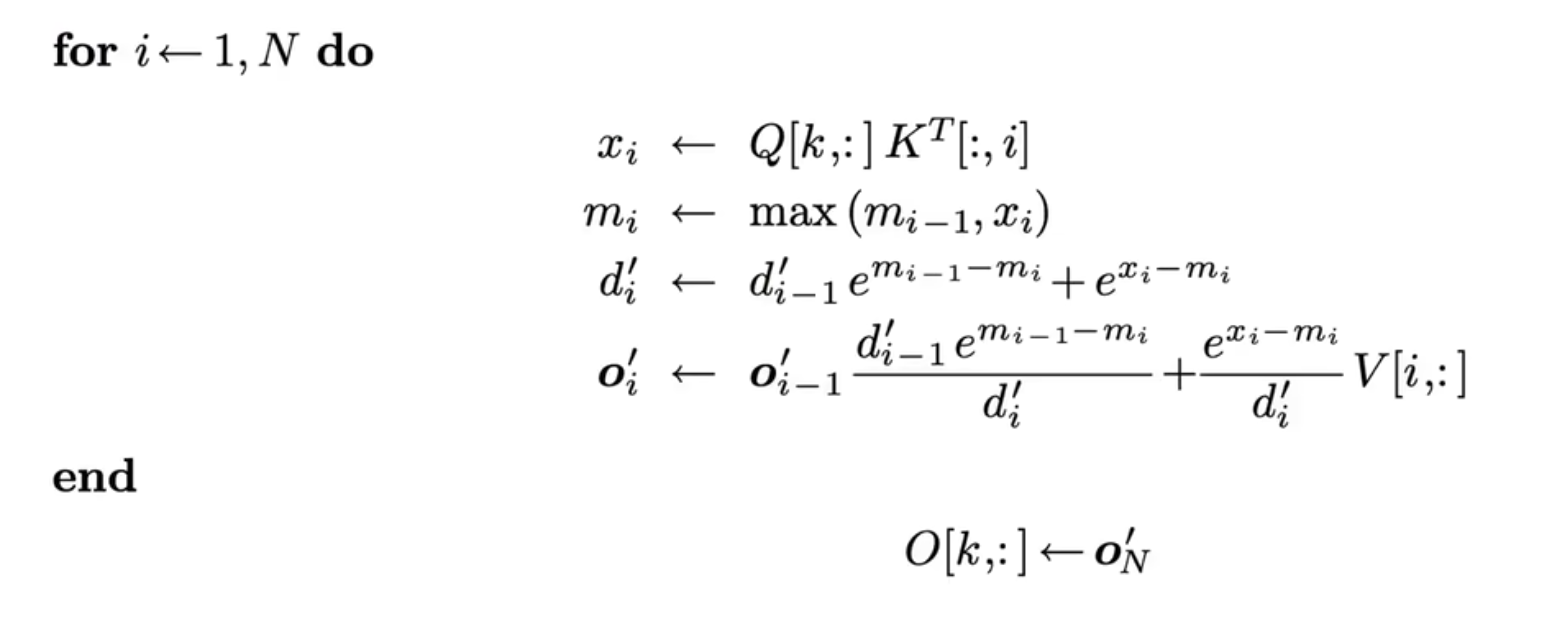
整理后得到:
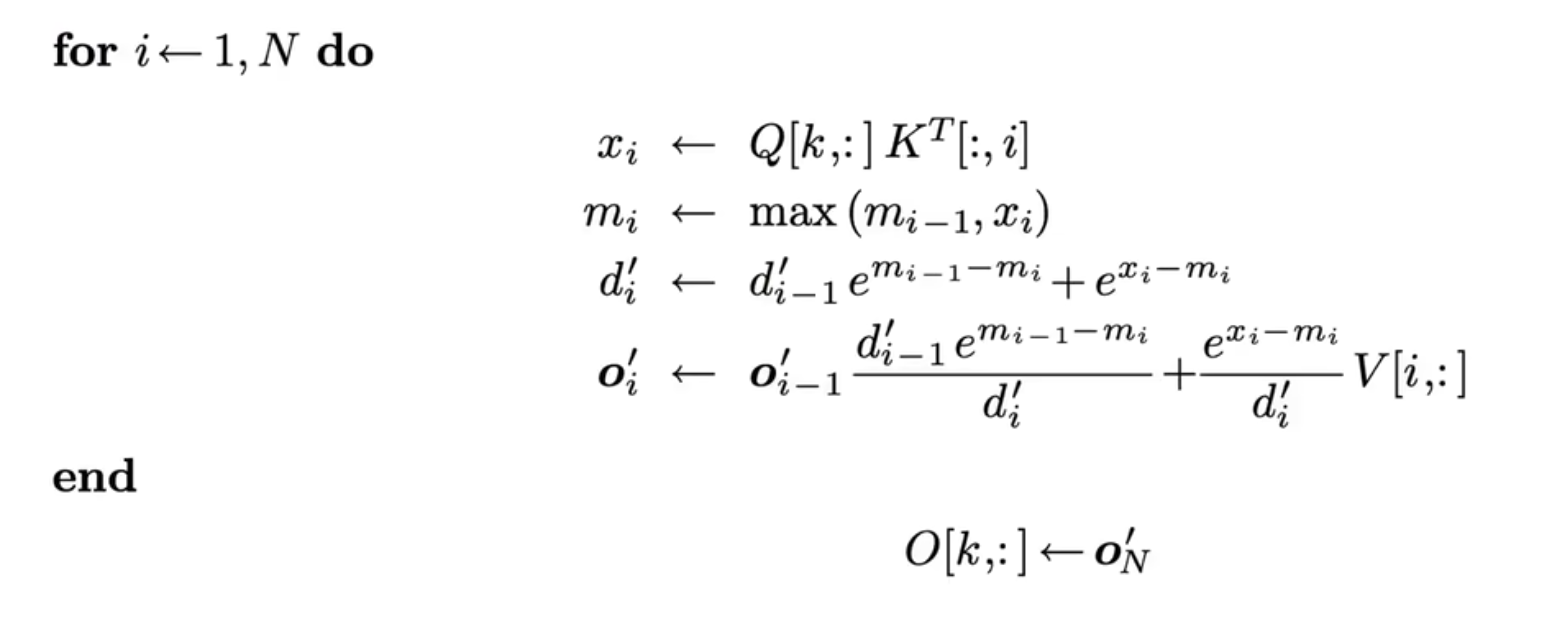
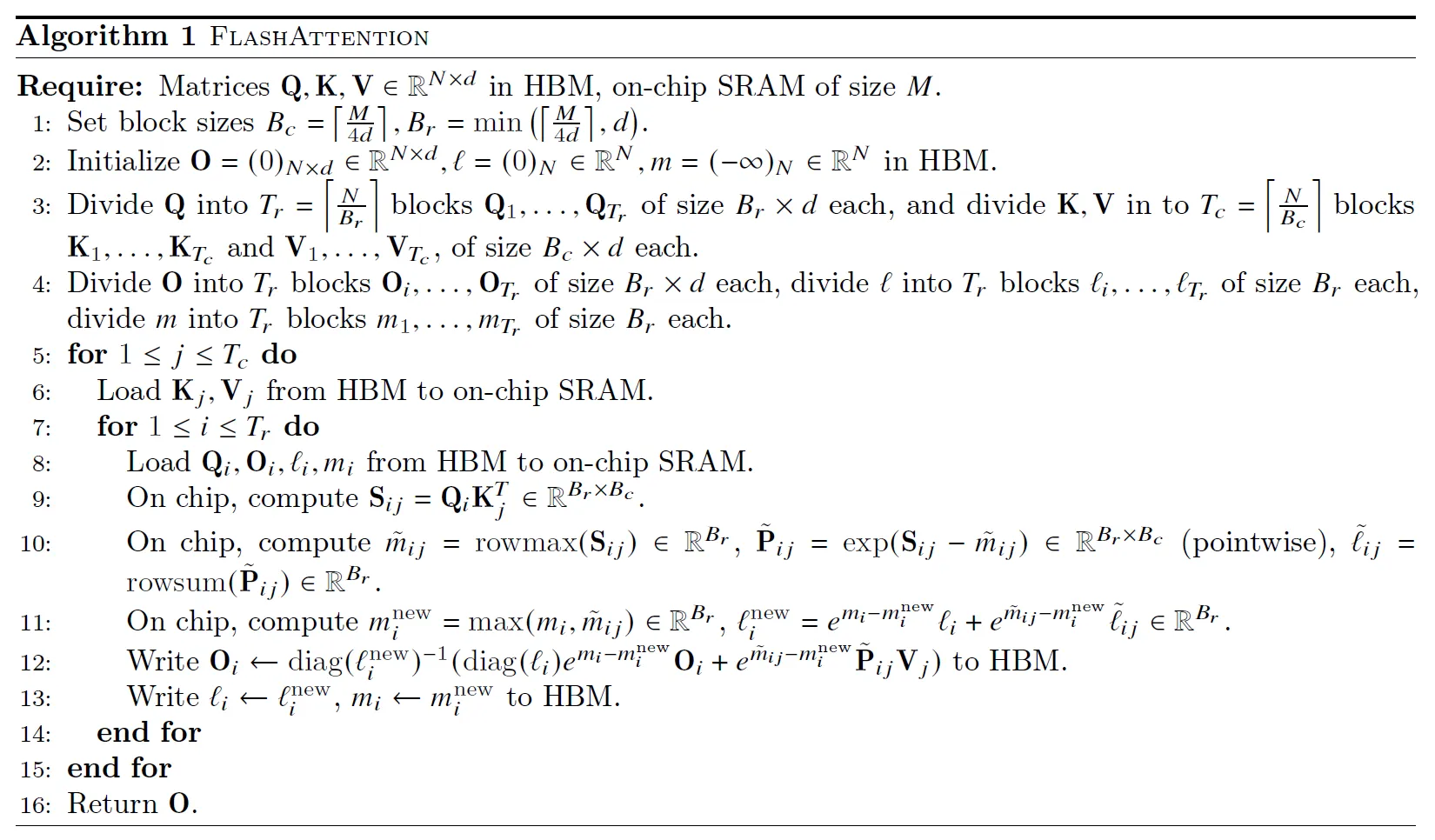
这就是一个 1-pass 的 Flash-Attention 算法。在此基础上,如果增加了 tile 操作,那么就会获得完全体的 Flash-Attention,但这本文的重点是对于 pass 的优化。
1.2 Einsum Notation
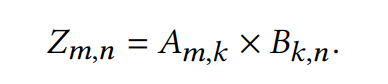
爱因斯坦求和标记(Einstein summation notation)是一种标记的约定,用于描述张量运算。比如说二维矩阵乘法就可以被描述为:
而矩阵与向量的乘法可以被描述为:
Einsum 的输入包括张量,如和其对应的坐标,如和,还有输出矩阵对应的坐标,如,比如在 numpy 中,$$$$和$$$$的矩阵乘法写作:
np.einsum('mk,kn->mn', A, B)Einsum 的特点在于,它将 compute 和 reduce 阶段完全区分开了,而不是混在一起,更加清晰了。
具体而言,在 compute 阶段,我们会根据输入坐标,构建一个迭代空间,然后遍历空间中的每一个点进行计算,得到一个相同维度的张量。以矩阵乘法为例,输入坐标是和,我们构建的迭代空间是。经过计算得到的张量是。
在 reduce 阶段,我们需要将我们得到的张量 $z{m,k,n}$ 与输出坐标 进行比对,发现多了一个 维度。所以我们会沿着多出的维度进行规约,然后就可以得到 $$z{m,n}=[\sum^{K}{k=1}[a{m,k} \times b_{k,n}]$$。
对比我平时用的矩阵乘法,可以看到 compute 和 reduce 是混合在一起的。
for (int i = 0; i < M; i++) {
for (int j = 0; j < N; j++) {
for (int k = 0; k < K; k++) {
Z[i][j] += A[i][k] * B[k][j];
}
}
}1.3 TeAAL
TeAAL 是一个加速器模型 generator,可以根据不同算子生成不同的加速器模型。在它的设计中,算子需要使用 Einsum Cascade 来进行描述,也就是一系列的 Einsum 。
使用 Einsum 好处在于,引入了迭代空间,使得许多加速器设计中的优化和 tradeoff 都非常清晰。TeAAL 提出了 3 个维度的优化:
- Loop Order:迭代空间“是还是”?这会影响数据是 stationary 的,还是 stream 的。
- Splitting:运算中我们常常将输入分块计算,也可以视为在对迭代空间分块。
- Work scheduling:根据迭代空间计算出的张量,是如何摆放的?包括空间和时间维度。
总之 Einsum 是一个非常适合数学化表述加速器设计的标记。
1.4 Extended Einsum
传统的 Einsum 是不能指定运算符的,比如说在 Numpy 中,Compute 阶段只能使用乘法,Reduce 阶段只能是加法:
np.einsum('mk,kn->mn', A, B)而 Extended Einsum 则允许自定义 Compute 和 Reduce 阶段的运算符,例如:

是 Compute 阶段使用的运算符,是 Reduce 阶段使用的运算符。
除此之外,Extended Einsum 还可以表达循环,比如说前缀和计算:
还可以表达递推式,同样是前缀和计算:
有了 Extended Einsum,我们就可以描述 Flash-Attention 这种包含许多复杂运算和递推式的算法。
二、Contribution
2.1 Einsum 与 Pass
本文认为,如果将算子写成 Einsum 的形式,那么是有助于确定算子的 Pass 数的,比如说这个算子,就是 2-Pass:
而相同功能的另一个算子,就是 1-Pass:
本文认为,迭代空间也可以被表示成一个 fibertree,而根据这些 fibertree 就可以判断 pass。首先,我不知道为什么原本适用于稀疏矩阵表示的 fibertree 要用来表示一个非常稠密的迭代空间(它可能是想说 fibertree 用于表示根据迭代空间生成的那个向量),其次,我不知道为什么表示成了 fibertree,就可以看出来是多少个 Pass。
它原文中对迭代空间的 fibertree 定义如下,非常的简略:
The is-fibertree is a special tree where each fiber belongs to a rank in the iteration space of the Einsum.
而他介绍的根据 fibertree 识别 Pass 的方法,则依赖于非常主观的“Dependency”,其定义基本上和 Flash-Attention 中的定义一样:
Now, in a scenario where fibers for a particular rank exist in multiple is-fibertrees; in each, they project to the same tensor; and there is a dependency such that all of the elements of the earlier is-fibertree’s fiber must be read before any element can be read again by the later is-fibertree (for all mappings of the cascade**)**, we refer to that read-read sequence as creating an additional pass.
这种冗余和主观定义的方式,指示它无法编写成一个程序来自动优化 Pass 数目:
We leave a full analysis of the space of pass-reduction approaches to future work.
2.2 用 Einsum 表示 Flash-Attention
用 Extended Einsum 表示 Flash-Attention,结果如图:
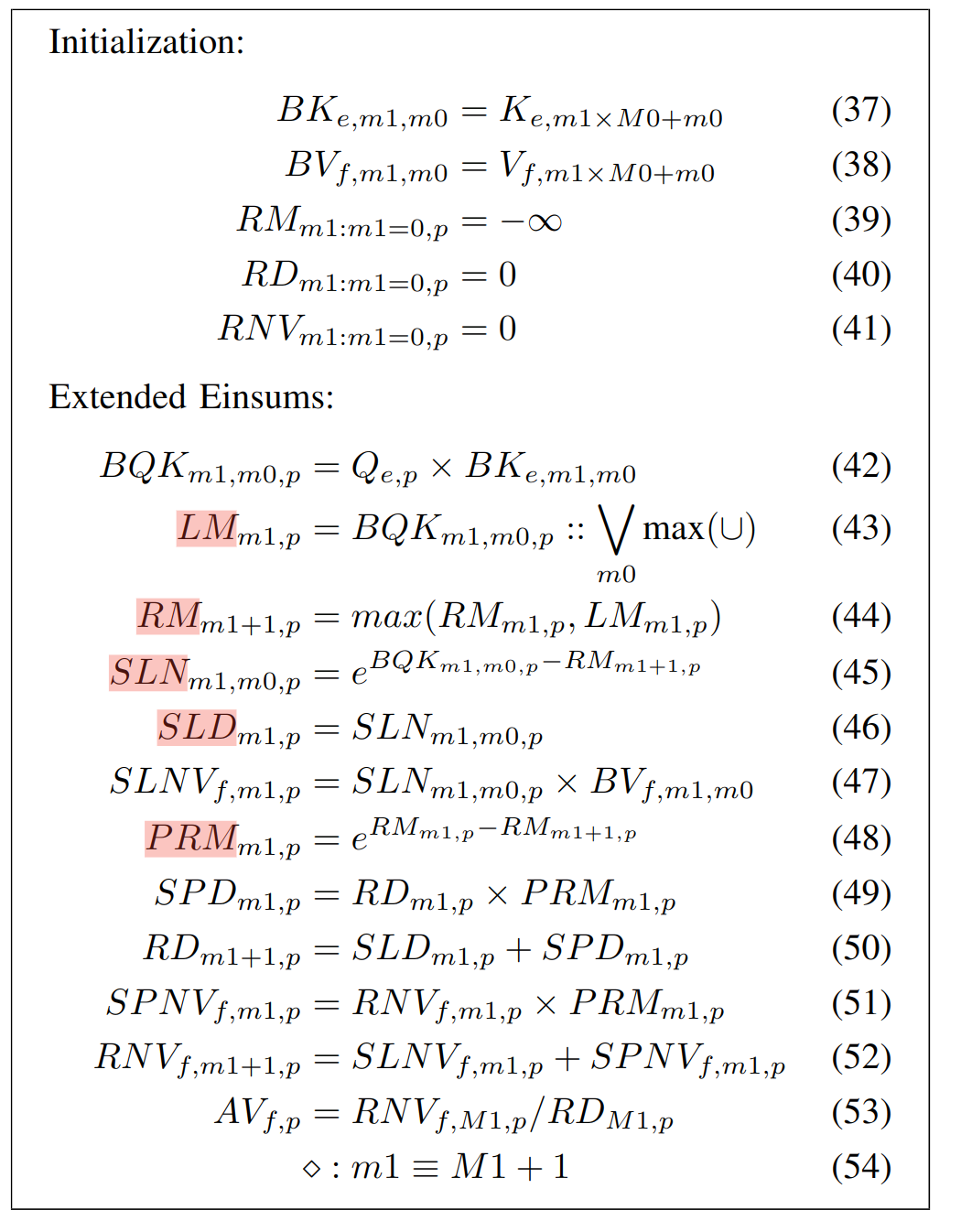
文章只是将 Flash-Attention 换了一种标记形式(从伪代码到 Einsum Cascade),其算法的实质并没有发生改变。
2.3 将 Flash-Attention Map 到硬件上
本文将 Flash-Attention 实现到了 Timeloop and Accelergy 模拟的 spatial 架构上:
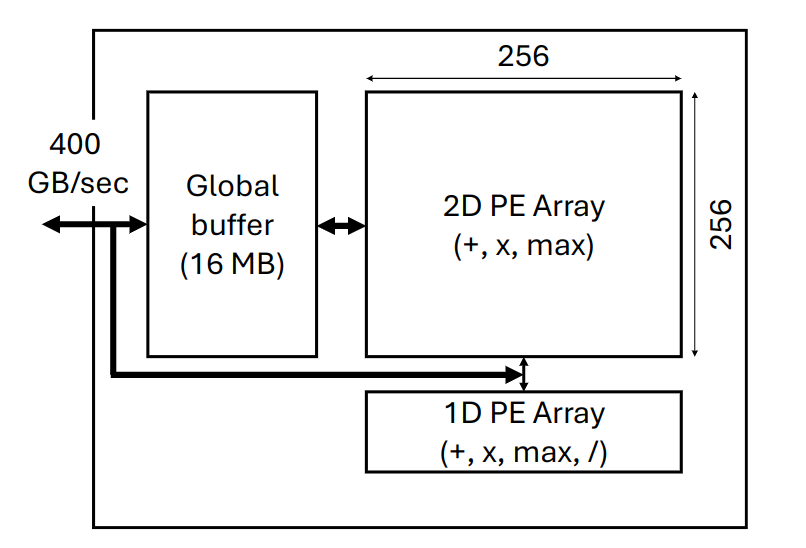
传统的 Attention 加速器,使用 2D Array 来计算矩阵乘法,使用 1D Array 来计算 softmax,这种安排的缺点在于,1D Array 计算 softmax 非常吃力,进而导致 2D Array 需要等待 1D Array 的计算,造成了低计算利用率。
但是 Flash-Attention 算法本身就融合 softmax 到前面的计算中,所以有一部分的 softmax 的计算任务,是可以放到 2D Array 中计算的,这样两个部分的计算任务就更加均衡了。
此外,2D Array 的 fill 和 drain 的开销很大,所以需要使用流水线的方法摊还(amortize)开销。
三、Evaluation
3.1 Setup
实验在 TimeLoop 模拟器上进行(全是 Python 代码),BaseLine 分别是一个未经优化的 Attention 加速器,和 FLAT(经过 Fusion 等优化,但是依然使用普通 Attention 算法的加速器)。
WorkLoad 有 BERT,TrXL,T5,XLM。
3.2 Compute Utilization
在真实负载情况下,计算单元利用率的比值:
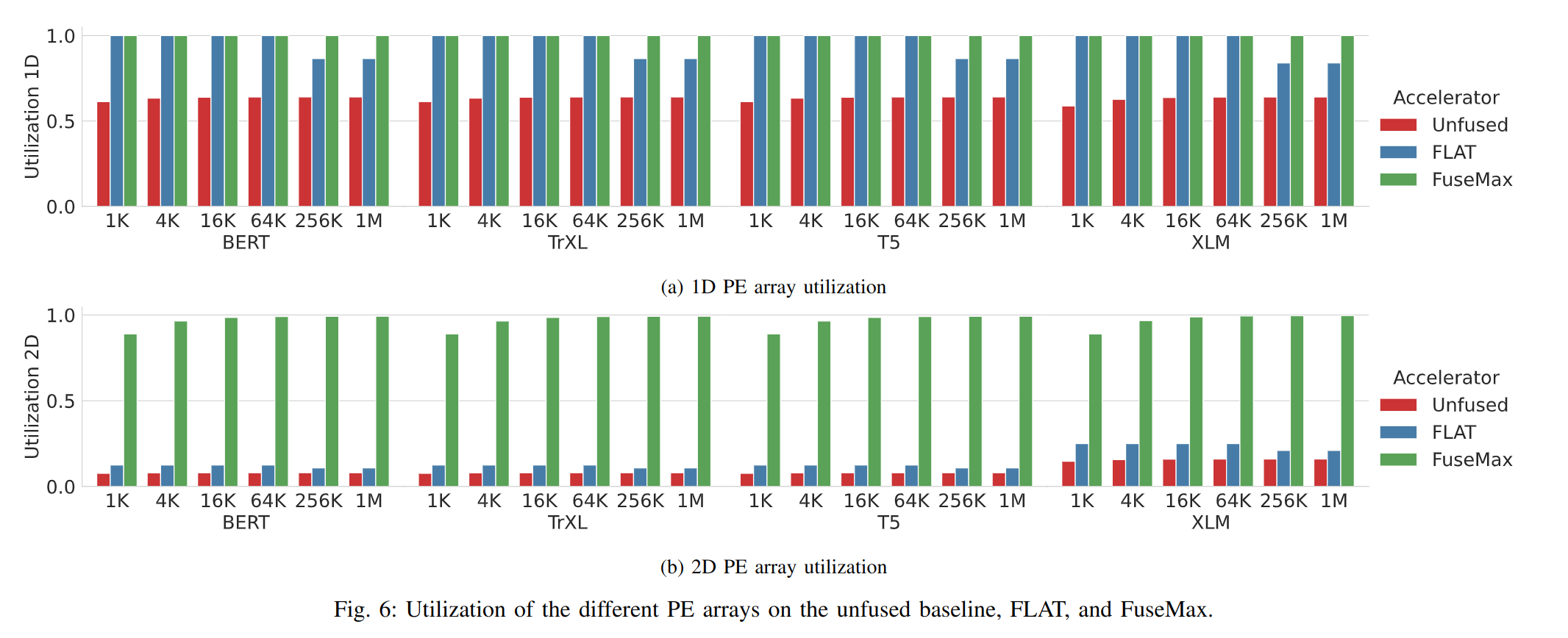
正如前文分析的,Baseline 的 2D Array 受到 1D Array 的拖累,导致利用率极低。
而在序列长度过长时,传统 Attention 算法会导致 global buffer 溢出,进而计算率下降,而 Flash-Attention 则没有这个问题。
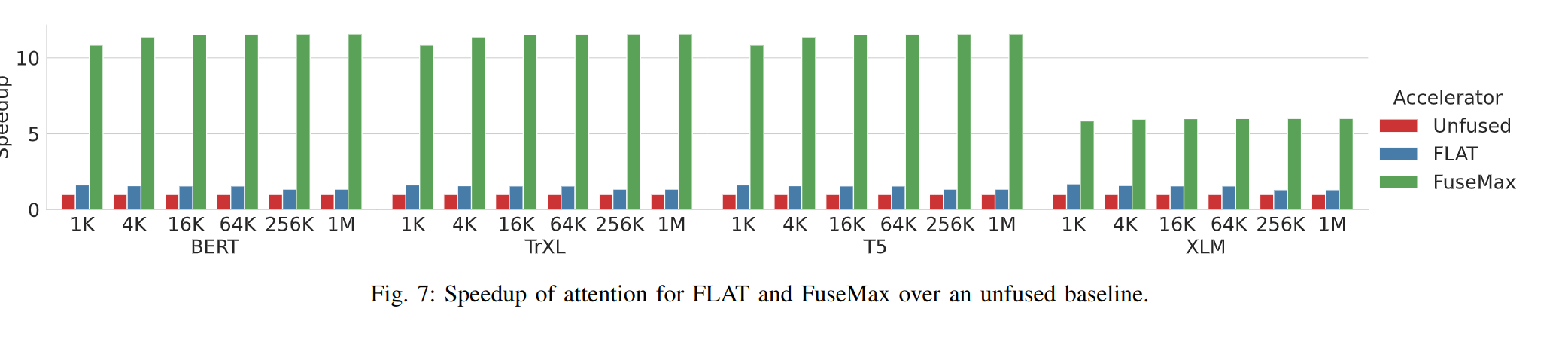
3.3 SpeedUp
在 attention 时的加速比:
在 inference 时的加速比:
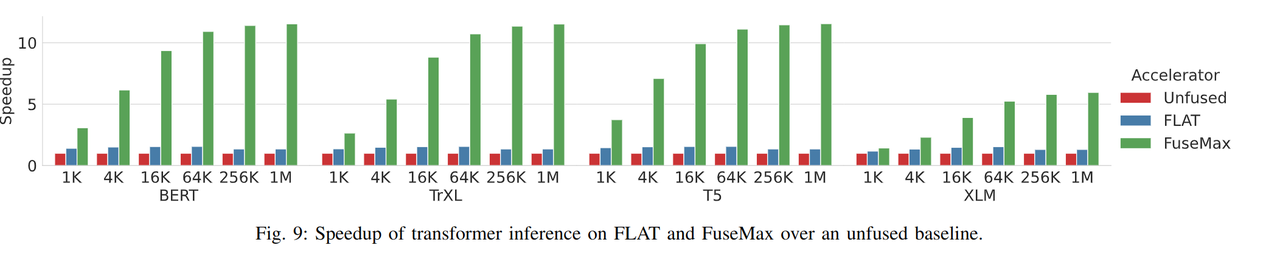
因为计算单元利用率提高,所以加速比也显著提高。
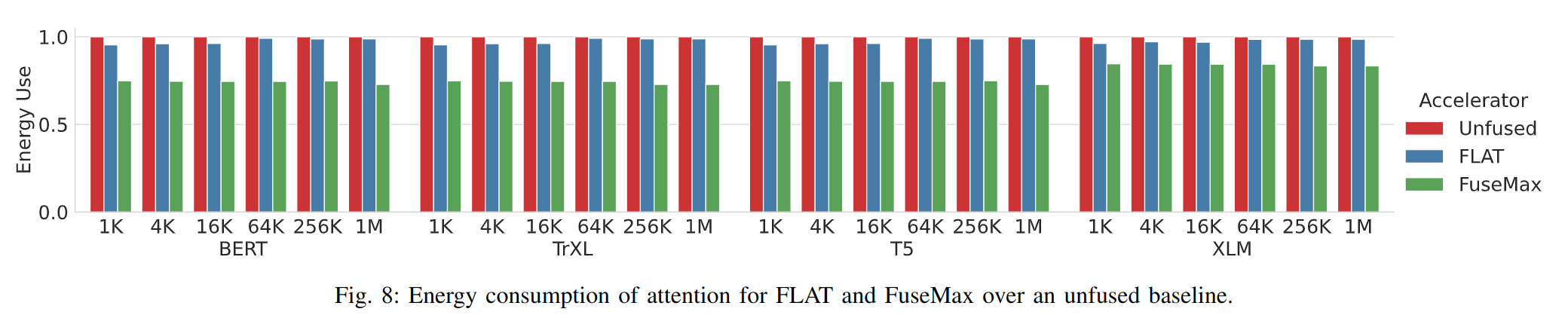
3.4 Energy
在 attention 时的能耗:
在 inference 时的能耗:
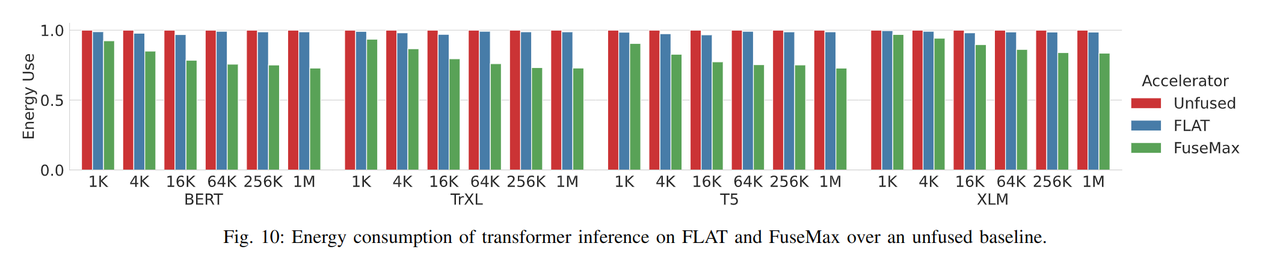
Flash-Attention 节约了 DRAM 的访存开销。
四、计算密度
这篇工作主要结合了前人的工作,许多成果本质上是算法(Flash-Attention)或者开发框架(TeAAL,Timeloop)的成果,而非这篇工作自己的成果。
随着计算单元数目的增多,Roofline 模型中的硬件的 越来越往右移动,这就导致越来越多的算法成为 memory bound 的:
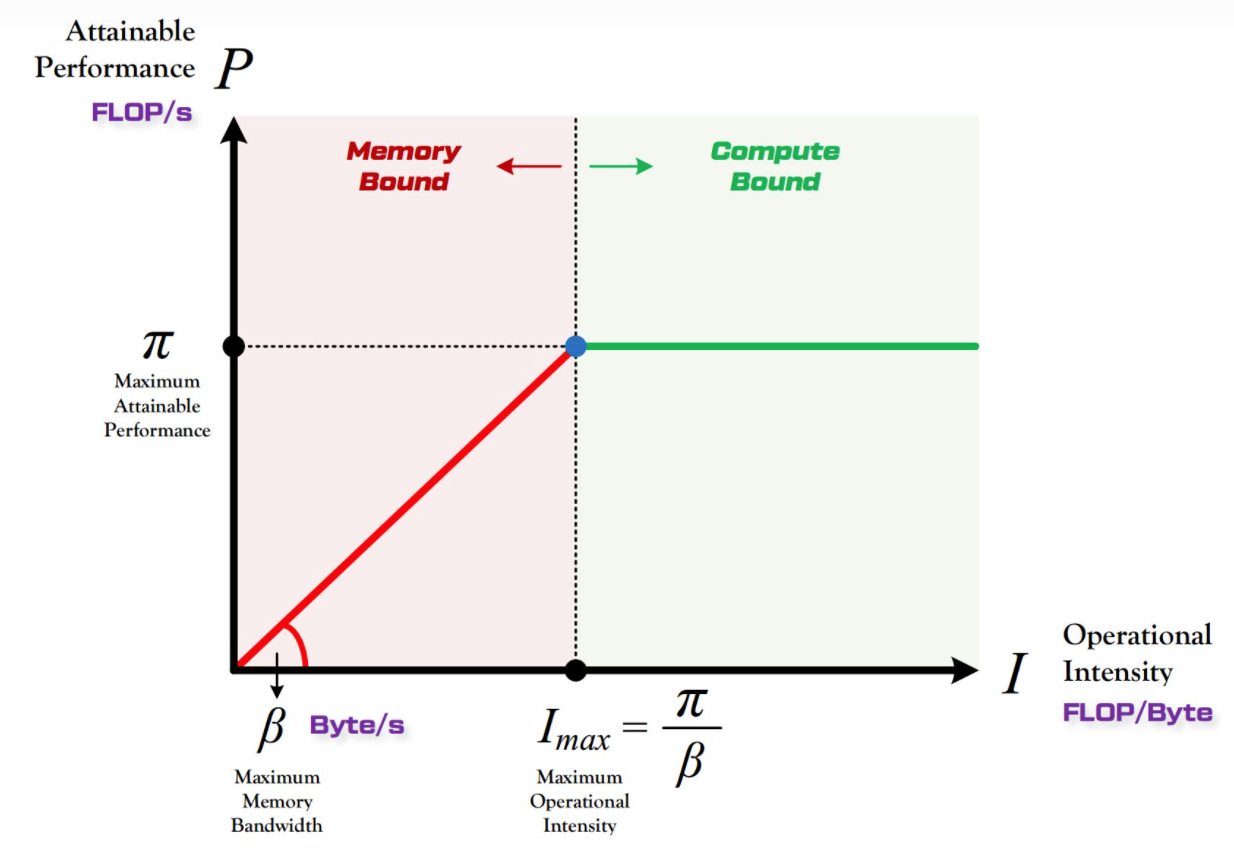
有一种解决问题的方式是减少内存读取的次数,比如说 Kernel Fusion:
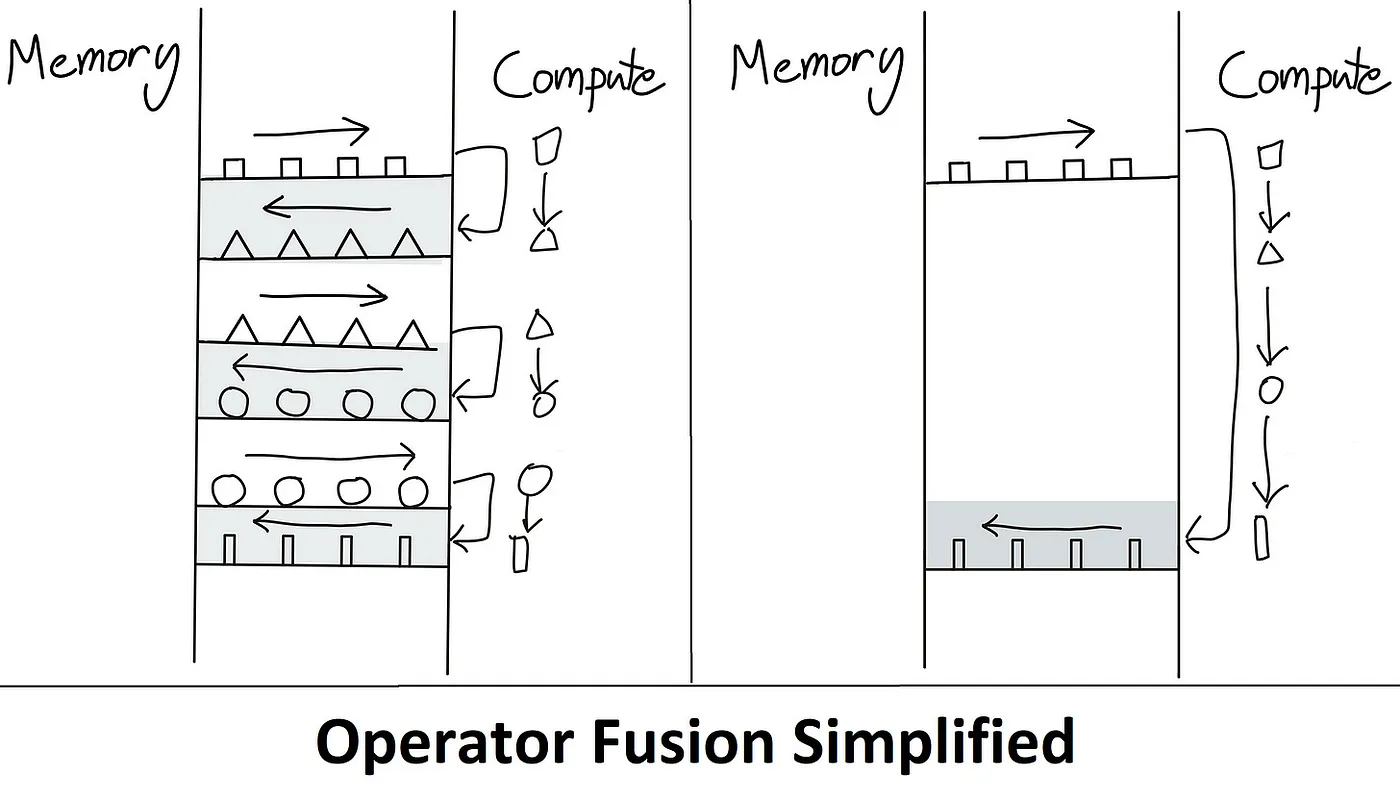
直白的 Fusion 并不会修改算子的实现,它只是将计算的中间结果存在了 On-chip Memory 中,但是 On-chip Memory 空间有限,这就导致一旦存不下来,依然会溢出到 Off-chip Memory 中,最终效果并不好(从上文的 Evaluation 中也可以看出)。
为了解决溢出问题(或者单纯为了减少访存次数),有一种思路是增加 On-chip Memory 的容量,比如说 IPU,相比于 CPU 和 GPU,就增加了更多的片上 SRAM:

但是这种方式存在问题,就是片上 SRAM 的面积过大,IPU 很少去和 GPU 对比单位芯片面积(iso-area)下的性能。
Flash-Attention 和 FuseMax 我认为是另一种思路的代表,就是“以算代存”,计算的中间结果并存储后供后续使用,而是当需要使用的时候,再次计算一遍,是一种更加“数据流”的方法。通过构造额外的计算,来避免存储(Flash Attention 引入了更多的冗余的计算,但是减少了冗余的存储):
我个人隐隐约约感觉,计算单元和存储单元有某种统一性,如果能把握它并提出一种更好的抽象,或许可以做出一个更本质的 tradeoff。