Attention Engine 可以被理解成“Attetion 算子库 + Attention 运行时”。有以下设计:
- 可拆分的 Attention 算子:提高了 GPU 内存带宽利用率
- 新的 KV Cache 管理抽象 CBSR:兼具 PagedAttention 和 RadixAttention 的优点,更 general
- 宏观上动态、微观上静态的调度运行时:动态的同时不损害静态抽象和收益
- 可定制的 Attention 算子框架、JIT:一些工程特性
FlashInfer 这篇工作在 2023 年就提出了,据作者所言,那个时候只有 FlashAttention1,还没有 FA2&3,FlashDecode 等工作,但是这些工作论文发得更早。
一、Background
FlashAttention
传统的 Attention 运算需要扫描 3 遍 GPU Memory 中的 Attention Logits 矩阵(len, len),计算密度低。
FlashAttention 提出了 1-pass 的 attention 算法,提高了计算密度,缓解了 GPU Memory 到 GPU Cache 的 IO 瓶颈:
FlashAttention1 不适应 Decode 场景
FlashAttention 是为了训练开发的,Queries 的长度往往很长(也就是 Queries 彩色方块的高度很高),这样可以充分利用 GPU 上的计算资源。
而在 decode 阶段,采用自回归生成,每次的 Queries 的长度就为 1(也就是 Queries 彩色方块高度只有 1),那么计算资源就不会得到充分利用(按照 FlashDecode 的说法,是不到 1%)。
更加形式化地去看,在 FlashAttention 中,设置 是 Queries 的长度,是 K 的长度,那么一次 Attention 计算的访存开销是 ,计算开销是 ,则计算密度是:
如果考虑 是一个很大的值(长文本或者推理模型都会导致 很大),那么计算密度约等于 。当 时就会导致计算资源利用不足。
Attention 的输入是动态变化的
而实际情况会更加复杂,query 的长度是会动态变化的,从应用场景区分,有 3 种:
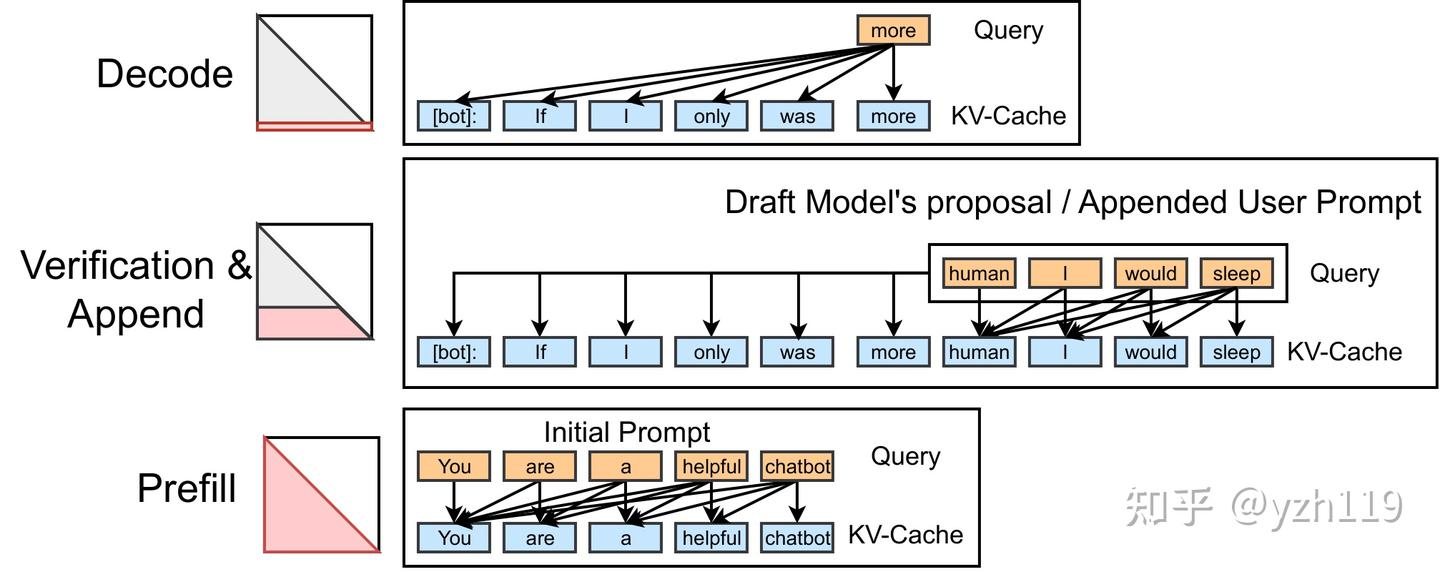
放到 roofline 上来看
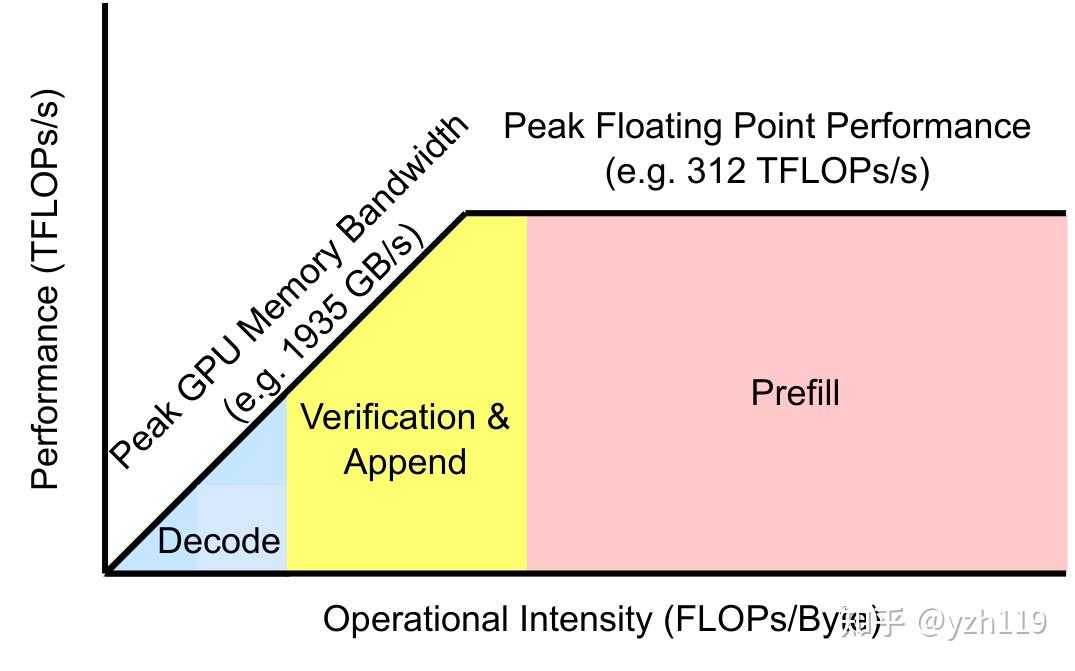
动态变化的 Queries 长度就对 Attention 的动态性提出了一定的要求。
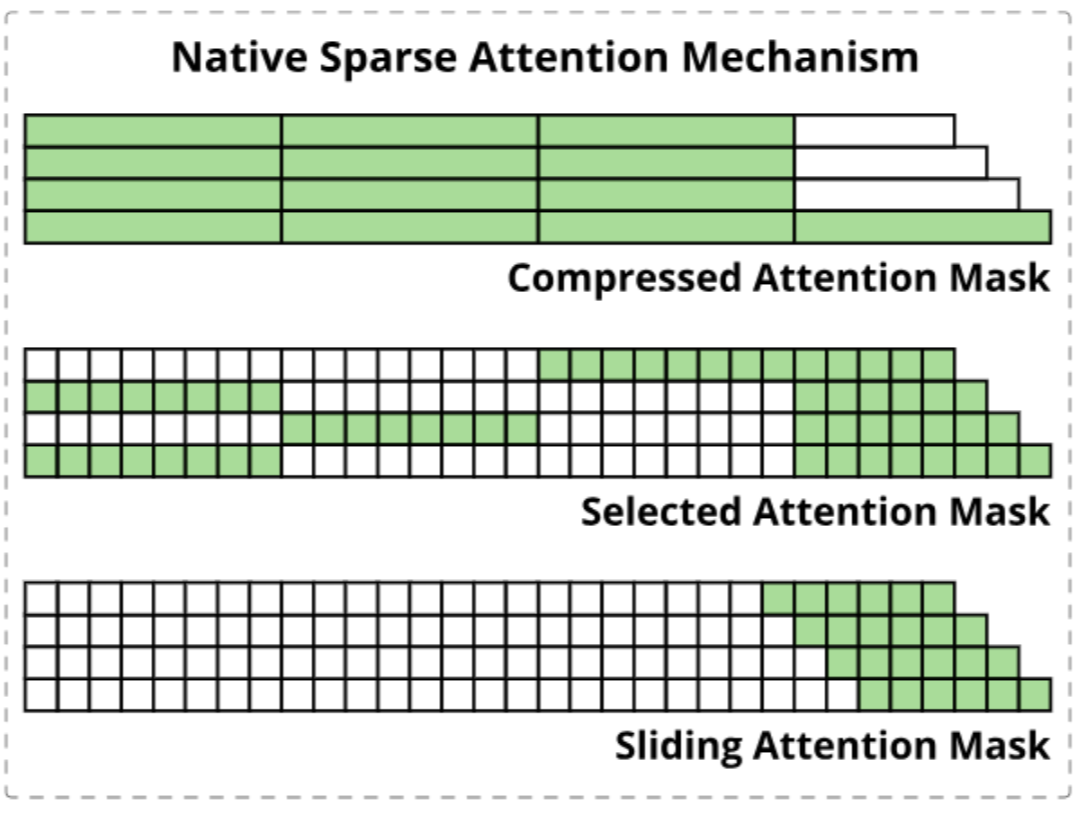
此外优化长文本有一种经典的技术就是 KV Cache 稀疏,也就是 KV Cache 也会存在变化(不止是单调递增),如 NSA 就包含三种稀疏特性:
Attention 算子库既要利用特化的优势,又要有足够好的定制性。
二、Design
2.1 Split-K
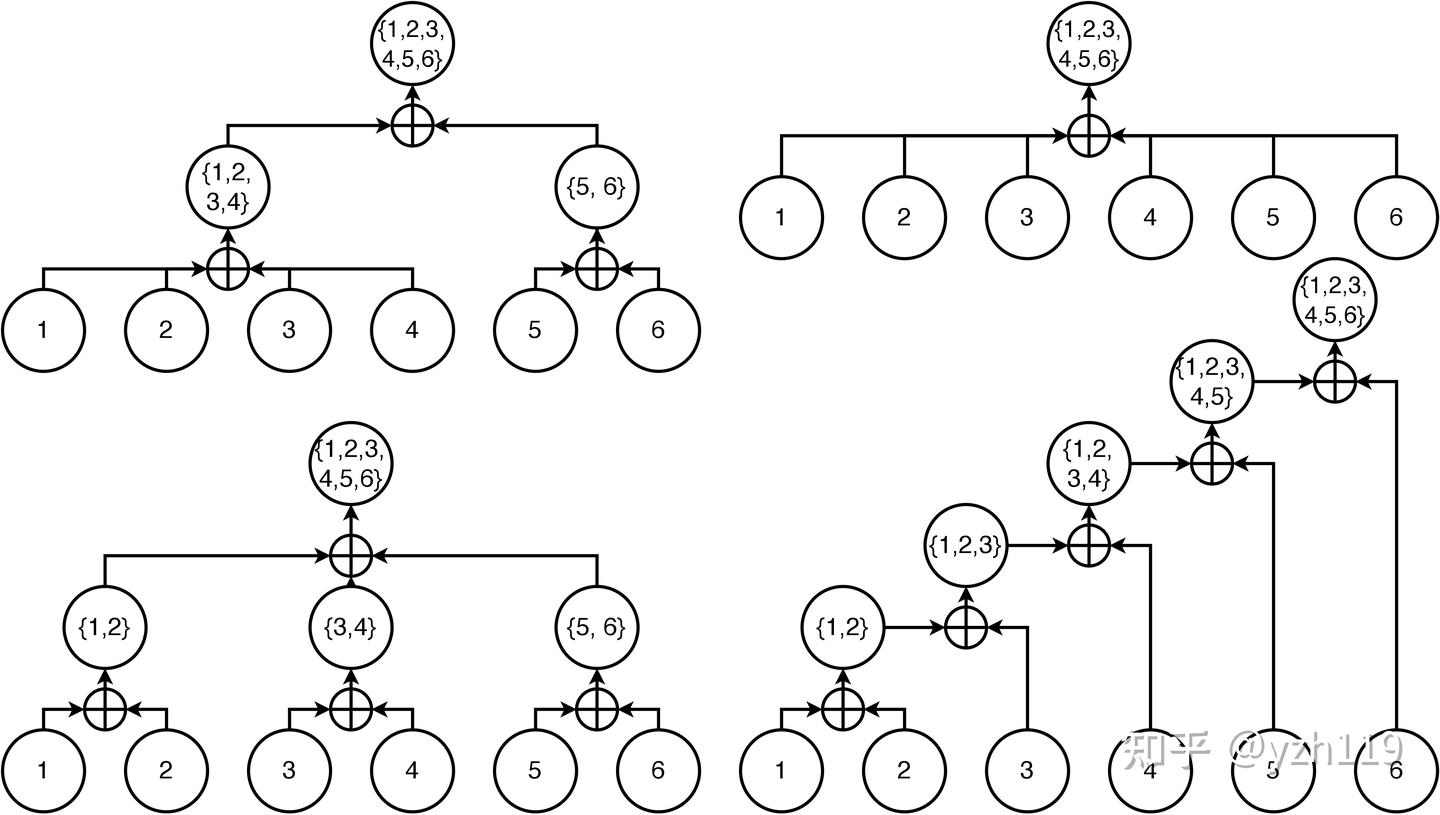
原版的 FlashAttention 需要利用前缀和不断缩放校正(scale)局部结果,但是“前缀和”就意味着“顺序遍历”,而当 Queries 的长度较小时,就容易导致利用率不高。
通过调整算法,我们可以实现并行计算不同的 KV Cache Chunk:
所以为了达到这种 merge 的效果,我们需要记录每个 block 的一些运算结果,这些结果在文中被称为 Attention State。
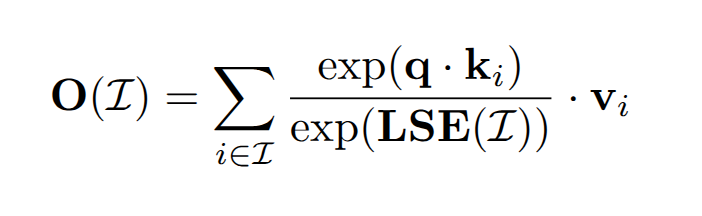
每个 block 需要记录两种 State,分别是 attention scale:
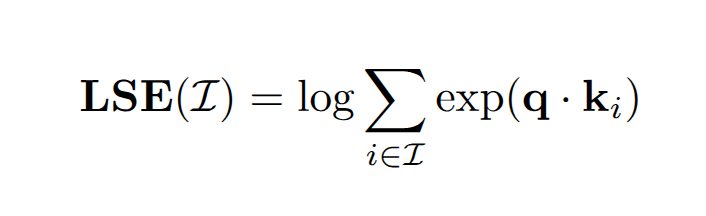
和 attention output:
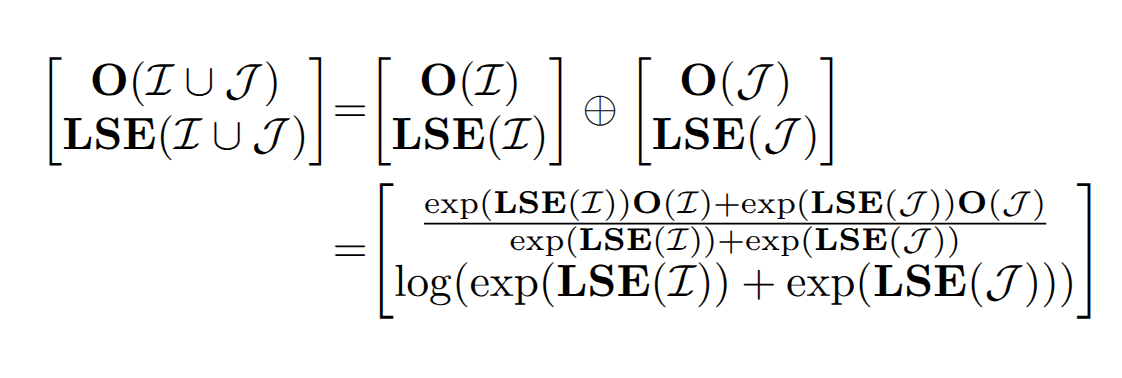
有了这两个东西以后,我们就可以将 block 和 block 融合到一起了:
Split-K 算法改善了 FA1 在 Decode 场景下计算资源利用率不足的问题。
Split-K 策略也是 FlashDecode 的核心 Idea,对此 FI 的作者叶子豪解释道:
其实主要原因是我们跟 FA2 和 FlashDecoding 的开发几乎都是同期进行的,在 FlashAttention2 发布之前我们已经独立探索过了 FA2 中大部分的优化。而 FlashDecoding 我们在去年 8 月就已经有了较完整的实现和评测,不过我对 LLM 这个领域的内卷程度稍有低估没有及时推广,导致被抢发出来。抛开这些虚名而言,LLM Serving 还有很多工程上的问题需要解决,同志仍需努力。
2.2 Composable Attention
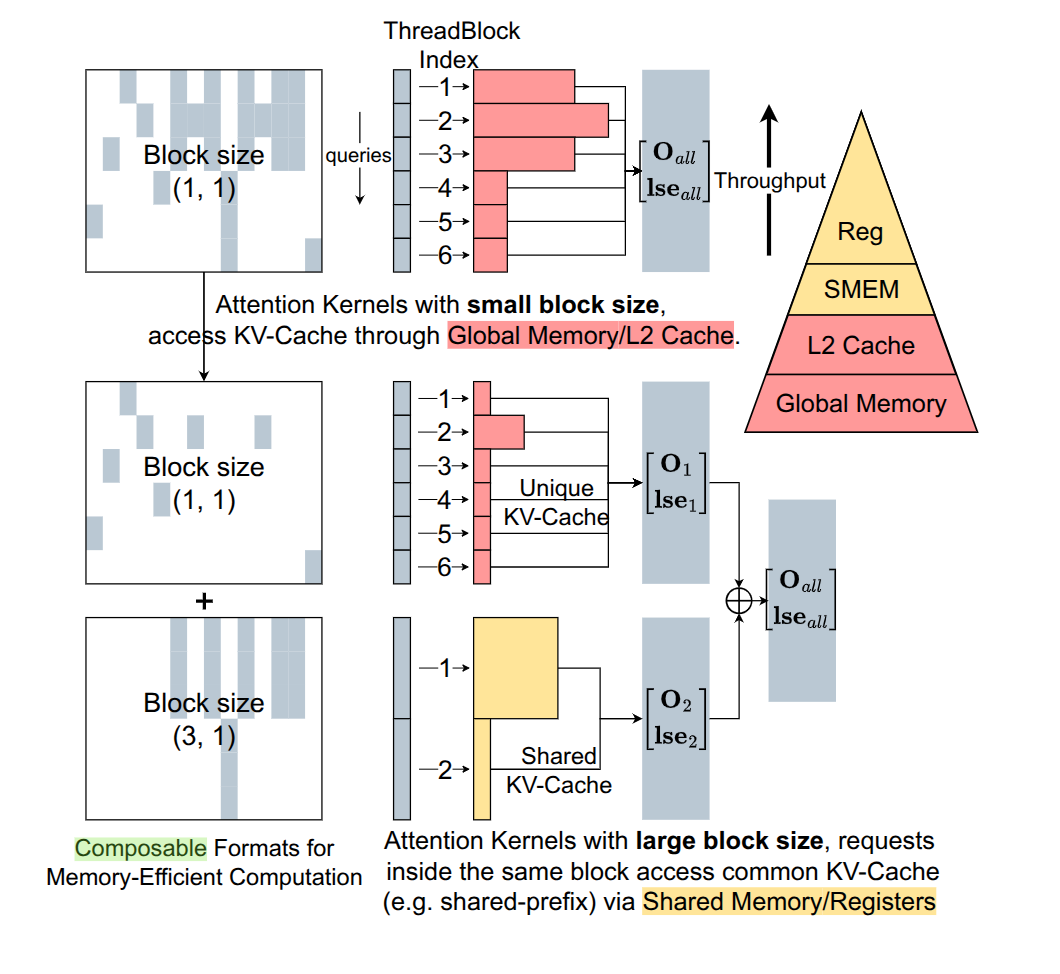
在有了 Split-K 算法之后,我们就有一个可拆分、组合的 Attention 算子。也就是说,Attention 算子所需要的 Q,KV 都可以被拆分成 Chunk,然后分步或者并行计算,只要最后规约在一起就好了。这给了设计者极大的灵活性:
比如说我们可以自由组织各个计算步骤,将不同的任务分配给不同的 threadblock:
也可以将计算的中间结果保存下来在多个 Request 之间共享。
2.3 Block Compressed Sparse Row
BCSR 是 FI 管理 KV Cache 的数据格式,更本质的说,FI 在用一个**稀疏矩阵来模拟页表**对 KV Cache 进行管理。
我们先用 OS 上的物理页面管理举例,我们有 2 个 Proc,2 个 Physical Page。其中 Proc0 只有 Page1,Proc1 有 Page0 和 Page1,那么我们就可以用一个 bool 矩阵表示这种关系:
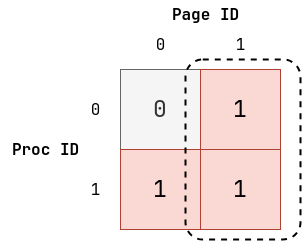
其中虚线的部分组成了一个 block,说明 Page1 是被 Proc0 和 Proc1 共享的。
然后我们迁移到 PI 上,将 Proc 换成 Query Chunk,将 Page 换成 KV Cache Chunk,有:
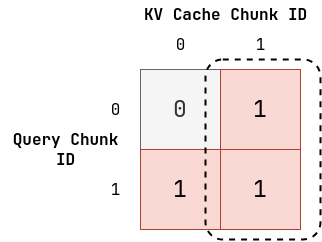
直接用论文中的图来看:
上图有一些省略的是,没必要用 bool 矩阵,而是可以用张量矩阵,矩阵中的每个元素都是一个形状为 (layer, head, dim) 的张量。
这种稀疏矩阵的表示方法,可以模拟出“内存分页”和“共享内存”的语义,这分别对应 PageAttention 和 RadixAttention 的设计。
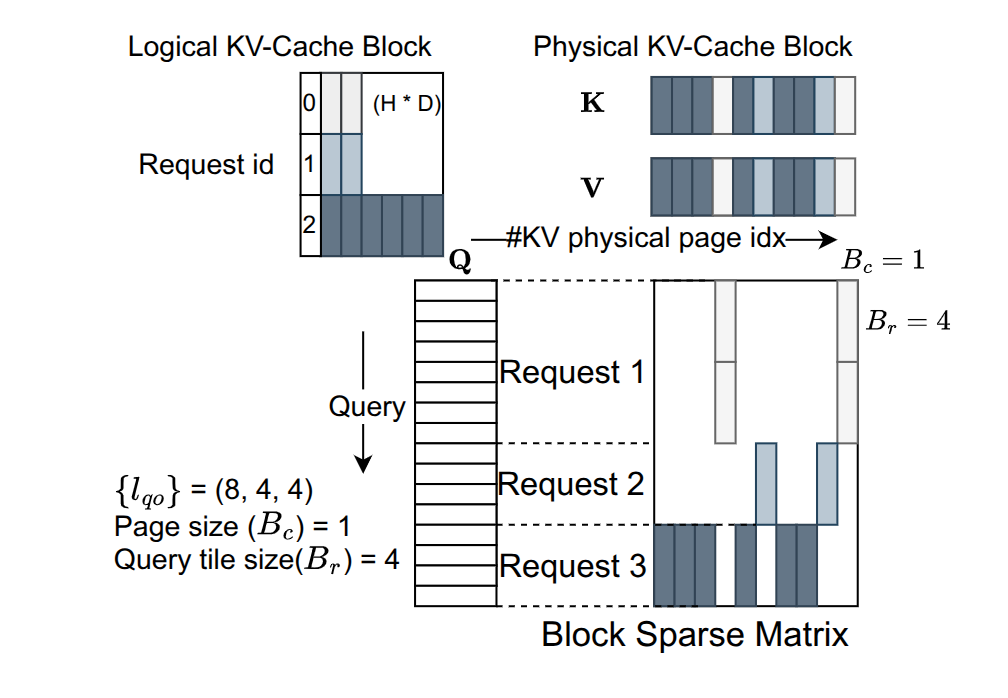
使用稀疏矩阵这种数据结构,可以最大限度的发现里面“成块”的张量:
这种 block 的矩阵,说明了其中的 KV Cache Chunk 会被 share,或者 Q Chunk 会被 Share,也就是会被经常使用。那么就应该把这种 KV Cache 或者 Q 放到高层次存储(寄存器或者 cache),而那些不被 share 的,放到低层次存储中。如下所示:
此外稀疏矩阵形式,也可以很简单的描述 KV Cache 稀疏策略(没有比矩阵更加直白的描述方式了)。
2.4 Dynamic Schedule
PI 调度的单位是 Attention 的小 block,调度算法的输入是一个 batch 内 QKV 的长度信息和当前硬件的架构信息(比如 TensorCore 的尺寸)。
调度的目标是 SM 的负载均衡,因为 Attention 可被拆分,所以调度算法设计并不难,如下所示:
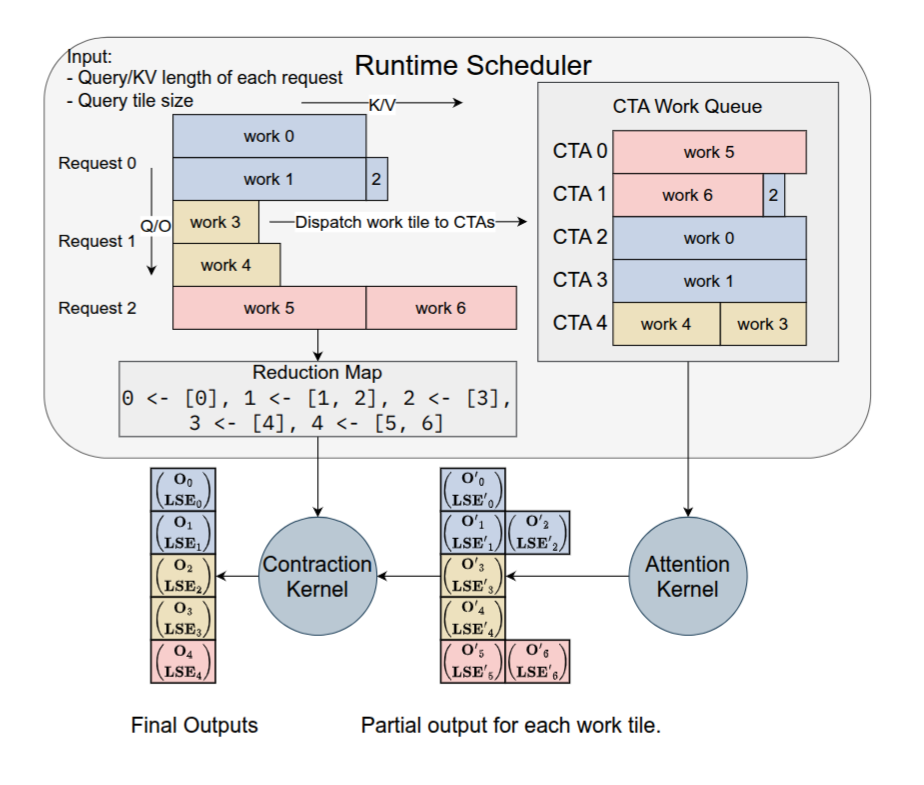
按照论文的说法,PI 采用的是一种“确定性调度”,这更有利于 LLM Serving,而且还可以发挥 CUDA Graph 的优势。
但是似乎这样就和动态调度有些违背,这里的动态调度指的是宏观上可以根据一个 batch 内的不同信息指定静态调度方针。
2.5 Other
- JIT:生成 CUDA 代码而不是 Triton 代码,一步到位
- 硬件架构:根据 GPU 架构选择
LDGSTS还是TMA,使用 TensorCore 还是 CUDACore,Chunk Size - 一系列 custom api,用于自定义 Attention 机制(FI 更像是一个 Attention 框架)。
- 融合 ROPE
三、Eval
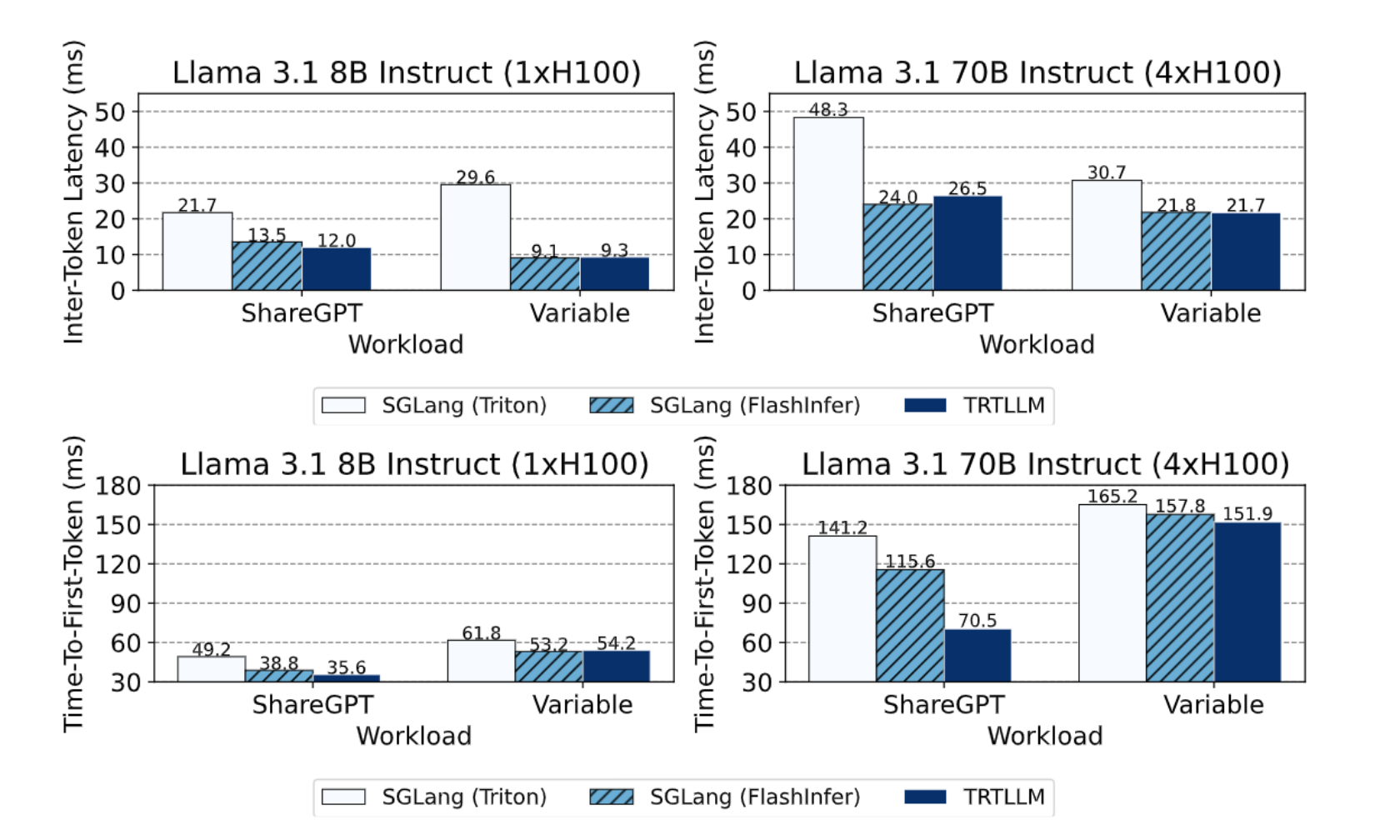
3.1 端到端推理
使用 SGLang(FI) 与 SGLang(Triton) 和 TRTLLM 对比。
相比于 SGLang(Triton),FI 的 FA 使用、JIT、动态调度使得其有良好的表现。
TRTLLM 作为 NVIDIA 的 Oracle,FI 有近似的表现。
3.2 Kernel 测试
与 FA2&3 进行对比,主要测试的是针对 Query 的动态特性,能不能有及时的反应:
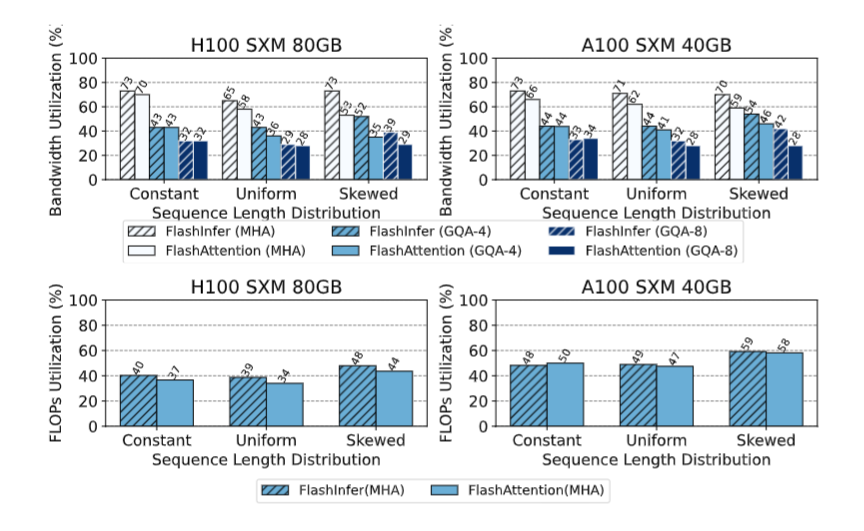
可以看到当 Query 具有动态性的时候,FI 更胜一筹,这说明 FI 的 runtime 更强。