硬件平台 - Cache
一、结构
因为一直分不清 Cache 的结构名字,所以特地画了一个比较满意的图来标注各种结构。
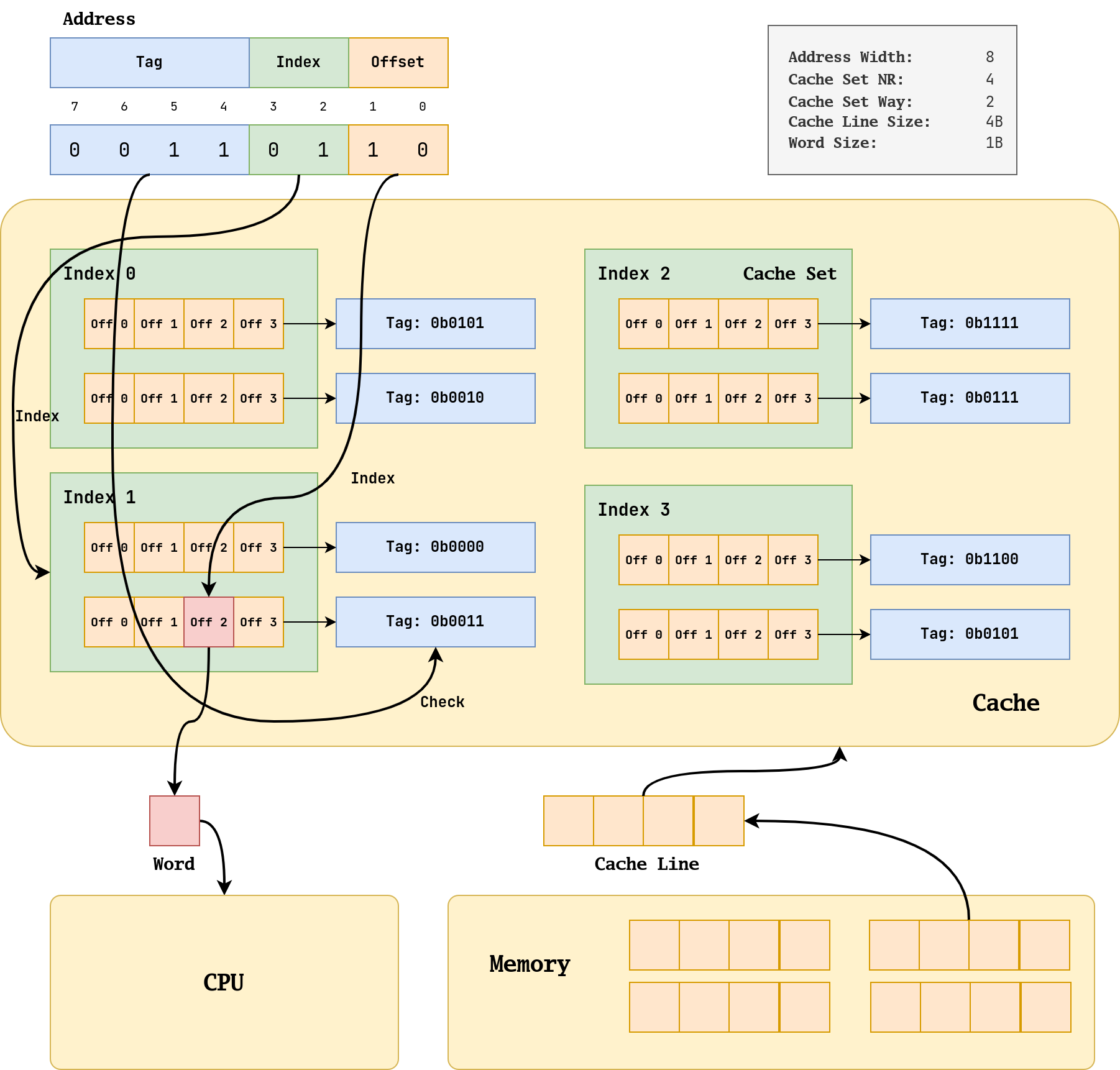
这个示意图的参数在右上角。Cache 中的基本单位是 Cache Line,它又被叫作 Block,它是由多个 Word 组成的。多个 Cache Line 会组成一个 Cache Set,一个 Cache Set 内包含的 Cache Line 数量被成为 Way。比如图中就是 2-Way 的 Cache,那么每个 Cache Set 就有 2 个 Cache Line。相同 Cache Set 中的 Cache Line 的关系被称为 associative(相联),它们不能依靠 set index 进行区分,只能通过 tag 区分。
根据 Set 个数和 Way 的不同(其本质是 Cache Line 的位置确定),可以对 Cache 进行分类:
- 直接映射(direct-map):即 Way = 1 的情况
- 组相连(set-associative):即普通情况
- 全相连(fully-associative):即只有一个 Set,所有的 Cache Line 都是 associative 的。
他们的功能上的区别在 Cache 的检索和分配上均有体现。会在下面章节进行介绍。
二、查找
2.1 过程
首先补充 Cache 和 CPU 还有内存沟通的数据大小:CPU 每次从 Cache 中取出一个 Word,而 Cache 每次从 Memory 中取出一个 Cache Line。
CPU 会给 Cache 发送一个地址,这个地址有可能是虚拟地址,也可能是物理地址,这取决于具体的架构实现方式。这个地址还有一个特点是按照 Word 对齐的。虽然这个示意图中 Word 只有一个字节,没有对齐的必要,但是在常见的 Word 为 4 个字节的 32 位架构中,这个地址的 [1:0] 一定是 0 。
交给 Cache 的地址会被分成 3 个部分,即上图的 Tag(蓝色),Index(绿色) 和 Offset(橙色)。检索 Word 的过程是一个 “Index-Check-Index” 的过程。
首先我们根据绿色部分 index 找到对应的 Cache Set(这是一个像随机地址访问的过程,称之为 Index),因为 Index 是 1,所以我们找到左下角的 Cache Set 1。然后就会发现里面有一堆的 Cache Line,对于这些 Cache Line,我们没有办法直接确定哪一个是我们要找到的 Cache Line,我们需要用地址上的蓝色部分 Tag 和 Cache 中的 Tag 进行比对,只有完全相同才是我们要找的 Cache Line,所以我们在此图中选择了第二个 Cache Line(这个过程需要比对所有的 Tag 的所有位,称之为 Check)。在选定 Cache Line 后,我们需要根据 橙色部分 Offset 选择 Cache Line 中具体的 Word,图中 Offset 是 2,所以我们选择第 2 个 Word 交给 CPU(这个过程和绿色部分一样,也是 Index)。
如果用伪代码描述,是如下过程:
using Word = char; |
上述过程基本上描述了 “一个 Word 是怎样从 Cache 中根据地址被检索出来” 的过程,省略的部分主要是对于 Cache Line valid 和 dirty 等属性的检验。
对于检索成功的情况,我们称之为 hit(命中),而对于检索失败的情况,我们称之为 miss(缺失)。
2.2 矛盾
在上述过程中,Index 具有随机访问的特征,所以会比较快,而 Check 需要对 Set 内的每个 Line 的 Tag 进行比对,所以比较慢。Check 和 Way 直接相关,因为 Way 就是 Set 里 Line 的数量,所以 Way 越大,Check 对硬件性能的要求越高(因为比较电路非常耗片上资源,而且存储 Tag 也需要额外的空间)。但是换一个角度思考,当 Way 变大时,我们命中 Cache 的可能性也会变大,因为此时会存在更多候选的 Line 。所以选择多少 Way 其实是需要权衡的。
当 Cache 的总容量一定(这个比较实际,因为 Cache 总容量跟 Cache 需要消耗的片上资源直接相关)的时候,Way 和 Set 数量是反比关系,所以我们应当考虑好这个矛盾,也就是高命中率(Way 多)和低硬件成本和复杂度(Set 多)。
2.3 地址翻译
2.3.1 地址策略
在上面的介绍中,我们并没有强调我们查找 Cache 的时候的地址是物理地址还是虚拟地址,这是因为这是受到具体的硬件架构设计。具体的策略有 3 种:VIVT、PIPT、VIPT,这里的英文是都是缩写,分别对应 Virtual,Physical,Index,Tag 英文。
2.3.2 VIVT
VIVT 指的是完全使用 VA 进行 Cache 查找,这种方式的优势是,在查找前不需要经过 MMU 将 VA 翻译成 PA,命中只需要花费查找的时间,而缺失的时候再经过 MMU 翻译成 PA 进行访存,是非常高效的(因为 MMU 翻译也是很消耗时间的),
但是缺点有两个:歧义 (ambiguity) 和别名 (alias) 。这其实都是虚拟地址空间本身特性导致的问题。
歧义指的是相同的 VA 对应不同的 PA,这是由于相同的 VA 来自不同的进程地址空间,这就要求 OS 在进程切换的时候需要刷新 Cache,这就导致了切换后会有一个冷启动过程。
而别名指的是不同的 VA 对应了相同的 PA,这是由于虚拟地址可以让不同 VA 映射到相同的 PA 上,别名问题会导致一个 Cache 中可能存在多个物理内存的副本,而当我们更新这些副本的时候,有可能没有更新全部副本,导致操作。解决这个问题的方式就是将这种共享的 PA 设置成 nocache 的,即禁止他们使用 Cache。除此之外,似乎还可能用硬件措施解决多副本问题。
2.3.3 PIPT
PIPT 指的是完全使用 PA 进行 Cache 查找。因为物理地址具有唯一性,所以就不会存在 VIVT 所面临的歧义和别名问题,OS 的维护难度会直线下降,这部分的维护开销也会被取消。
但是其缺点就是每次 Cache 查找都需要经过 MMU 翻译,需要承担翻译的开销。但是因为现代的 MMU 有 TLB 加速,所以开销是可以接受的。现代的 Cache 往往采用 PIPT 的形式。
2.3.4 VIPT
当我们讨论使用 VA 的缺点时,本质其实在说用于查找的 Tag 和 Index 到底是 Virtual 的还是 Physical 的,如果是 Virtual 的,那么就会有歧义和别名问题,如果是 Physical 的,那么就不会有。
VIPT 指的是使用 Physical 的 Tag 和 Virtual 的 Index 。这样的好处在于,地址翻译过程和 Cache 查找过程可以并行,在地址翻译还没有结果的时候,我们就可以用 VI 来进行 Cache Set 的确定了。而且这种方式不再有歧义问题了,但是可能有别名问题。
对于歧义问题,此时的 PT 不再是 PA 的 Tag 部分,而变成了 PPN,PPN 具有唯一性,所以不再有歧义问题。
而对于别名问题,则要分类讨论,因为 Index 依然是虚拟的,那么使用 PPN 作为 Tag 能否矫正 VI 的影响呢?这要看 PPN 的宽度(反过来也可以说看 Index 的宽度),如下所示:
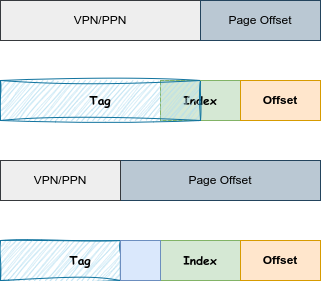
如果是第一种情况,VI 和 PI 存在差异,所以就会有别名现象,而第二种情况,VI 和 PI 不存在差异,就不会有别名现象。
总结就是 PPN 和 Index 不能有交集,就不会有问题。
三、分配与更新
3.1 分配的情形
当我们考虑将一个 CacheLine 从 Memory 中填充到 Cache 中时,这个 CacheLine 一定会被确定地放到某个 CacheSet 中,但是具体是哪个 CacheLine Slot,那就不一定了,我们有 Way 种选择。
其实原本的 CacheSet 中的 CacheLine Slot 也有 3 种情况,第一种是这个 slot 是空的,那么 CacheLine 放到这里就好了。第二种是这个 slot 本来就放着 这个待插入的 CacheLine,那么什么都不用干就好了。最后一种是这个 Slot 本来就放着一个不同的 CacheLine,那么就需要把原本的 CacheLine 逐出(evictation)。至于选择 set 中的哪个 line 逐出,基本上我们采用 LRU 策略来决定。
从逐出角度考虑,当 Way 增大的时候,CacheLine 的选择会更加灵活,逐出会更少。
从宏观角度看,逐出的存在是因为 Cache 比 Memory 小。如果 Index 的宽度是地址宽度减去 Offset 宽度,那么就不存在逐出了,很可惜事实并不是这样。相同 Index 的 CacheLine 会被分配到同一个 set 中,而 Way 只是提供了一种逐出的 “缓冲”。
3.2 Index Position 分析
在示意图上展示的 Index 在低位,而 Tag 在高位。这样做的效果就是,一些地址相近的数据(也就是高位地址相同),会被分散到各个 Set 中,这无疑是好的。因为程序具有局部性,地址相近的数据大概率会被反复用到,如果将它们分配到同一个 Set 中,那么就会导致它们互相挤占(Evictation),导致命中率降低。
3.3 分配策略
cache 的分配策略(allocation policy)是指我们什么情况下应该为数据分配 cache line,也就是合适从内存中将数据取出来放到 cache 中。分为读分配策略和写分配策略。
读分配策略指的是当 CPU 读数据时,发生 cache 缺失,这种情况下都会分配一个 cache line 缓存从主存读取的数据。默认情况下,cache 都支持读分配。
当 CPU 写数据发生 cache 缺失时,才会考虑写分配策略。当我们不支持写分配的情况下,写指令只会更新 Memory 数据,然后就结束了。当支持写分配的时候,我们首先从 Memory 中加载数据到 cache line 中(相当于先做个读分配动作),然后会更新 cache line 中的数据。
Cache 对读写的加速副作用是不一样的,Cache 加速写操作,如果采用写分配策略,那么就会有可能导致 Cache 和 Memory 中的数据存在差异(具体取决于更新策略)。
3.4 更新策略
更新策略(update policy)指的是,当 写操作(Store) 命中 Cache 时,Cache 应当如何更新其中的数据。有写直通(write through)和写回(write back)两种策略。
写直通指的是当 CPU 执行 store 指令并在 cache 命中时,我们更新 cache 中的数据并且更新 Memory 中的数据。cache 和 Memory 的数据始终保持一致。
当 CPU 执行 store 指令并在 cache 命中时,我们只更新 cache 中的数据。并且每个 cache line 中会有一个 bit 位记录数据是否被修改过,称之为 dirty bit。Memory 中的数据只会在 cache line 被逐出或者显式的 clean 操作时更新。因此,cache 和 Memory 的数据可能不一致。